 osrf-migration
commented
5 years ago
osrf-migration
commented
5 years ago Original comment by Alfredo Bencomo (Bitbucket: bencomo).
Can you try the release image?
https://osrf-migration.github.io/subt-gh-pages/#!/osrf/subt/wiki/tutorials/SystemSetupDockerhub
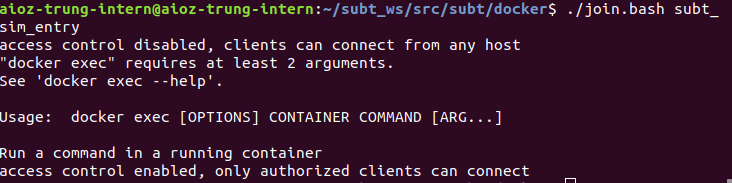 This is what happens in join.bash
This is what happens in join.bash 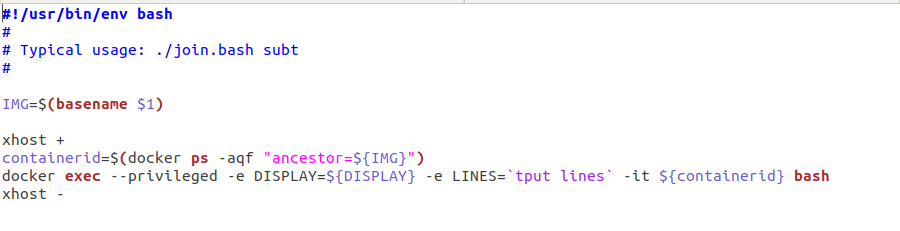

Original report (archived issue) by Lý Nguyễn (Bitbucket: Lý Nguyễn).
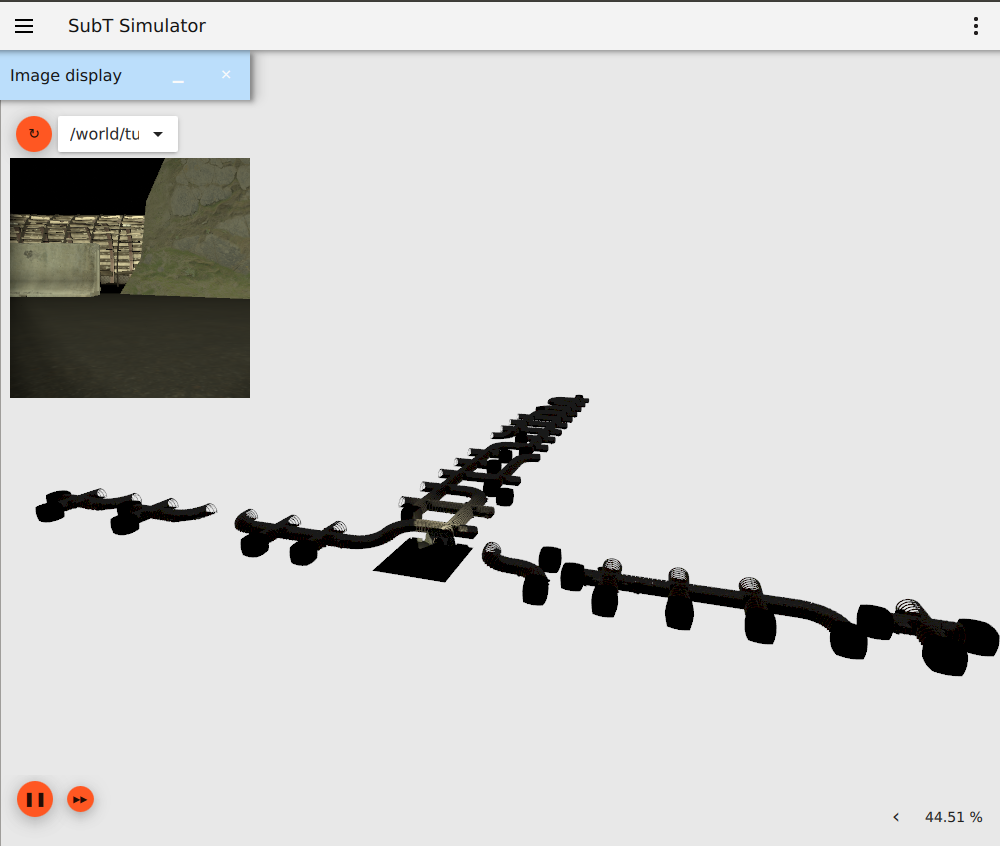
Hi all,
I am trying to run the SystemSetupDocker tutorial from https://osrf-migration.github.io/subt-gh-pages/#!/osrf/subt/wiki/tutorials/SystemSetupDocker. It ended up with a problem, I will attach its' images.