 osrf-migration
commented
5 years ago
osrf-migration
commented
5 years ago Closed osrf-migration closed 5 years ago
osrf-migration
commented
5 years ago osrf-migration
commented
5 years ago Original comment by Nate Koenig (Bitbucket: Nathan Koenig).
What command did you run? And can you post the terminal output?
osrf-migration
commented
5 years ago Original comment by Nate Koenig (Bitbucket: Nathan Koenig).
osrf-migration
commented
5 years ago Original comment by Alfredo Bencomo (Bitbucket: bencomo).
Carlos, shutdown the SubT Simulator (Ctrl-C), then clear your model cache and try loading the world again. You can clear it like this:
rm -rf ~/.ignition/fuelAfter that, can you also try with tunnel_circuit_practice_03 world?
osrf-migration
commented
5 years ago osrf-migration
commented
5 years ago Original comment by Carlos Thomson (Bitbucket: Carlos Thomson).
Same exact results doing the command
rm -rf ~/.ignition/fuelAnd tunnel_circuit_practice_03 also has wrong rendering
 ign launch -v 4 tunnel_circuit_practice.ign robotName1:=X1 robotConfig1:=X1_SENSOR_CONFIG_1 worldName:=tunnel_circuit_practice_03
ign launch -v 4 tunnel_circuit_practice.ign robotName1:=X1 robotConfig1:=X1_SENSOR_CONFIG_1 worldName:=tunnel_circuit_practice_03
[Dbg] [Manager.cc:523] Forked a process for [ros] command[roslaunchsubt_roscompetition_init.launchworld_name:=tunnel_circuit_practice_03vehicle_topics:=0]
[Dbg] [Manager.cc:523] Forked a process for [x1_description] command[roslaunch--waitsubt_rosx1_description.launchworld_name:=tunnel_circuit_practice_03name:=X1]
[Dbg] [Manager.cc:523] Forked a process for [x1_ros_ign_bridge] command[roslaunch--waitsubt_rosvehicle_topics.launchworld_name:=tunnel_circuit_practice_03name:=X1uav:=0laser_scan:=1stereo_cam:=0lidar_3d:=0]
[Dbg] [Manager.cc:773] Loading plugin. Name[ignition::launch::GazeboServer] File[libignition-launch-gazebo.so]
[Msg] Recording to [/tmp/ign/logs]
[Msg] Loading SDF world file[/home/carlos/subt_ws/install/share/subt_ign/worlds/tunnel_circuit_practice_03.sdf].
[Dbg] [Manager.cc:773] Loading plugin. Name[ignition::launch::GazeboGui] File[libignition-launch-gazebogui.so]
[Dbg] [Application.cc:87] Initializing application.
[GUI] [Dbg] [Application.cc:407] Create main window
roscore/master is not yet running, will wait for it to start
roscore/master is not yet running, will wait for it to start
... logging to /home/carlos/.ros/log/3c2fcf56-b866-11e9-b0da-04d4c424212b/roslaunch-life-5732.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
[GUI] [Msg] Loading config [/usr/share/ignition/ignition-gazebo2/gui/gui.config]
[GUI] [Dbg] [Application.cc:266] Loading window config
[GUI] [Dbg] [Application.cc:421] Applying config
[GUI] [Dbg] [Application.cc:305] Loading plugin [GzScene3D]
[GUI] [Msg] Transform mode service on [/gui/transform_mode]
[GUI] [Msg] Added plugin [3D View] to main window
[GUI] [Msg] Loaded plugin [GzScene3D] from path [/usr/lib/x86_64-linux-gnu/ign-gazebo-2/plugins/gui/libGzScene3D.so]
[GUI] [Dbg] [Application.cc:305] Loading plugin [WorldControl]
[GUI] [Msg] Added plugin [World control] to main window
[GUI] [Msg] Loaded plugin [WorldControl] from path [/usr/lib/x86_64-linux-gnu/ign-gui-2/plugins/libWorldControl.so]
[GUI] [Dbg] [Application.cc:305] Loading plugin [WorldStats]
[GUI] [Msg] Added plugin [World stats] to main window
[GUI] [Msg] Loaded plugin [WorldStats] from path [/usr/lib/x86_64-linux-gnu/ign-gui-2/plugins/libWorldStats.so]
[GUI] [Dbg] [GuiRunner.cc:35] Requesting initial state from [/world/tunnel_circuit_practice_03/state]...
[GUI] [Dbg] [GazeboGui.cc:134] Running the GazeboGui plugin.
started roslaunch server http://life:44225/
PARAMETERS
NODES
/
ros1_ign_bridge_life_5732_1011239890837338487 (ros1_ign_bridge/parameter_bridge)
subt_ros_relay (subt_ros/subt_ros_relay)
tf_world_static (tf2_ros/static_transform_publisher)
auto-starting new master
process[master]: started with pid [5781]
[GUI] [Msg] Loading plugin [ignition-rendering2-ogre2]
[GUI] [Dbg] [RenderUtil.cc:786] Create scene [scene]
master has started, initiating launch
master has started, initiating launch
ROS_MASTER_URI=http://localhost:11311
setting /run_id to 3c2fcf56-b866-11e9-b0da-04d4c424212b
... logging to /home/carlos/.ros/log/3c2fcf56-b866-11e9-b0da-04d4c424212b/roslaunch-life-5733.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
... logging to /home/carlos/.ros/log/3c2fcf56-b866-11e9-b0da-04d4c424212b/roslaunch-life-5734.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
process[rosout-1]: started with pid [5813]
started core service [/rosout]
process[ros1_ign_bridge_life_5732_1011239890837338487-2]: started with pid [5816]
process[subt_ros_relay-3]: started with pid [5820]
process[tf_world_static-4]: started with pid [5822]
started roslaunch server http://life:35103/
PARAMETERS
NODES
/X1/
pose_tf_broadcaster (subt_ros/pose_tf_broadcaster)
ros1_ign_bridge_battery_state (ros1_ign_bridge/parameter_bridge)
ros1_ign_bridge_camera (ros1_ign_bridge/parameter_bridge)
ros1_ign_bridge_gpu_lidar (ros1_ign_bridge/parameter_bridge)
ros1_ign_bridge_imu (ros1_ign_bridge/parameter_bridge)
ros1_ign_bridge_odom (ros1_ign_bridge/parameter_bridge)
ros1_ign_bridge_pose (ros1_ign_bridge/parameter_bridge)
ros1_ign_bridge_twist (ros1_ign_bridge/parameter_bridge)
ros1_ign_image_camera (ros1_ign_image/image_bridge)
ROS_MASTER_URI=http://localhost:11311
process[X1/ros1_ign_bridge_imu-1]: started with pid [5864]
process[X1/ros1_ign_bridge_pose-2]: started with pid [5865]
process[X1/ros1_ign_bridge_twist-3]: started with pid [5866]
process[X1/ros1_ign_bridge_camera-4]: started with pid [5871]
process[X1/ros1_ign_image_camera-5]: started with pid [5883]
process[X1/ros1_ign_bridge_gpu_lidar-6]: started with pid [5896]
process[X1/ros1_ign_bridge_odom-7]: started with pid [5910]
process[X1/ros1_ign_bridge_battery_state-8]: started with pid [5920]
process[X1/pose_tf_broadcaster-9]: started with pid [5936]
started roslaunch server http://life:37303/
PARAMETERS
NODES
ROS_MASTER_URI=http://localhost:11311
No processes to monitor
shutting down processing monitor...
... shutting down processing monitor complete
[Dbg] [EntityComponentManager.cc:620] Using components of type [2251689575469537287] / [ign_gazebo_components.World].
[Dbg] [EntityComponentManager.cc:620] Using components of type [13994732549916512682] / [ign_gazebo_components.Name].
[Dbg] [EntityComponentManager.cc:620] Using components of type [12592746352568925681] / [ign_gazebo_components.Gravity].
[Dbg] [EntityComponentManager.cc:620] Using components of type [13224937992534617849] / [ign_gazebo_components.MagneticField].
[Dbg] [EntityComponentManager.cc:620] Using components of type [8753193699724811771] / [ign_gazebo_components.Wind].
[Dbg] [EntityComponentManager.cc:620] Using components of type [12173050716021724529] / [ign_gazebo_components.WorldLinearVelocity].
[Dbg] [EntityComponentManager.cc:620] Using components of type [15943768124495574352] / [ign_gazebo_components.WorldLinearVelocitySeed].
[Dbg] [EntityComponentManager.cc:620] Using components of type [3297509811873971798] / [ign_gazebo_components.ParentEntity].
[Dbg] [EntityComponentManager.cc:620] Using components of type [17100615127981600159] / [ign_gazebo_components.Scene].
[Dbg] [LevelManager.cc:203] Levels enabled, but no
[Dbg] [LevelManager.cc:292] Reading levels info
[Dbg] [EntityComponentManager.cc:620] Using components of type [8064491505919932473] / [ign_gazebo_components.Level].
[Dbg] [EntityComponentManager.cc:620] Using components of type [6612894081701502240] / [ign_gazebo_components.Pose].
[Dbg] [EntityComponentManager.cc:620] Using components of type [11371360182141354106] / [ign_gazebo_components.LevelEntityNames].
[Dbg] [EntityComponentManager.cc:620] Using components of type [17121648710877364109] / [ign_gazebo_components.Geometry].
[Dbg] [EntityComponentManager.cc:620] Using components of type [4639224053471842703] / [ign_gazebo_components.LevelBuffer].
[Dbg] [EntityComponentManager.cc:620] Using components of type [2668898242563798256] / [ign_gazebo_components.DefaultLevel].
[Dbg] [SimulationRunner.cc:580] Loaded system [ignition::gazebo::systems::WindEffects] for entity [1]
[Wrn] [LogRecord.cc:184] Log path already exists on disk! Recording instead to [/tmp/ign/logs(2)]
[Msg] Recording to log file [/tmp/ign/logs(2)/state.tlog]
[Dbg] [SimulationRunner.cc:580] Loaded system [ignition::gazebo::systems::LogRecord] for entity [1]
[Dbg] [SimulationRunner.cc:653] Loaded system [ignition::gazebo::systems::Physics] for entity [1]
[Dbg] [SimulationRunner.cc:653] Loaded system [ignition::gazebo::systems::Sensors] for entity [1]
[Msg] Create service on [/world/tunnel_circuit_practice_03/create]
[Msg] Remove service on [/world/tunnel_circuit_practice_03/remove]
[Msg] Pose service on [/world/tunnel_circuit_practice_03/set_pose]
[Dbg] [SimulationRunner.cc:653] Loaded system [ignition::gazebo::systems::UserCommands] for entity [1]
[Dbg] [SimulationRunner.cc:653] Loaded system [ignition::gazebo::systems::SceneBroadcaster] for entity [1]
[Dbg] [SimulationRunner.cc:653] Loaded system [ignition::gazebo::systems::Imu] for entity [1]
[Dbg] [SimulationRunner.cc:653] Loaded system [ignition::gazebo::systems::Magnetometer] for entity [1]
[Dbg] [SimulationRunner.cc:653] Loaded system [ignition::gazebo::systems::AirPressure] for entity [1]
[Msg] Adding artifact name[extinguisher_1] type string[TYPE_EXTINGUISHER] typeid[4]
[Msg] Adding artifact name[backpack_1] type string[TYPE_BACKPACK] typeid[0]
[Msg] Adding artifact name[phone_1] type string[TYPE_PHONE] typeid[5]
[Msg] Adding artifact name[rescue_randy_1] type string[TYPE_RESCUE_RANDY] typeid[7]
[Msg] Adding artifact name[extinguisher_2] type string[TYPE_EXTINGUISHER] typeid[4]
[Msg] Adding artifact name[drill_1] type string[TYPE_DRILL] typeid[2]
[Msg] Adding artifact name[drill_2] type string[TYPE_DRILL] typeid[2]
[Msg] Adding artifact name[drill_3] type string[TYPE_DRILL] typeid[2]
[Msg] Adding artifact name[drill_4] type string[TYPE_DRILL] typeid[2]
[Msg] Adding artifact name[phone_2] type string[TYPE_PHONE] typeid[5]
[Msg] Adding artifact name[backpack_2] type string[TYPE_BACKPACK] typeid[0]
[Msg] Adding artifact name[rescue_randy_2] type string[TYPE_RESCUE_RANDY] typeid[7]
[Msg] Adding artifact name[rescue_randy_3] type string[TYPE_RESCUE_RANDY] typeid[7]
[Msg] Adding artifact name[backpack_3] type string[TYPE_BACKPACK] typeid[0]
[Msg] Adding artifact name[phone_3] type string[TYPE_PHONE] typeid[5]
[Msg] Adding artifact name[extinguisher_3] type string[TYPE_EXTINGUISHER] typeid[4]
[Msg] Run duration set to 0 seconds.
[Msg] Starting SubT
[Dbg] [SimulationRunner.cc:653] Loaded system [subt::GameLogicPlugin] for entity [1]
[Dbg] [EntityComponentManager.cc:620] Using components of type [6687176221774458630] / [ign_gazebo_components.Model].
[Dbg] [EntityComponentManager.cc:620] Using components of type [8546580419506082455] / [ign_gazebo_components.Static].
[Dbg] [EntityComponentManager.cc:620] Using components of type [9712747055438129860] / [ign_gazebo_components.WindMode].
[Dbg] [EntityComponentManager.cc:620] Using components of type [5081358965268446661] / [ign_gazebo_components.Link].
[Dbg] [EntityComponentManager.cc:620] Using components of type [8112400427272910195] / [ign_gazebo_components.Inertial].
[Dbg] [EntityComponentManager.cc:620] Using components of type [16454635107327670381] / [ign_gazebo_components.Visual].
[Dbg] [EntityComponentManager.cc:620] Using components of type [17938588655714334139] / [ign_gazebo_components.Collision].
[Dbg] [EntityComponentManager.cc:620] Using components of type [9225962031573086509] / [ign_gazebo_components.CollisionElement].
[Dbg] [EntityComponentManager.cc:620] Using components of type [10522242218202596205] / [ign_gazebo_components.CanonicalLink].
[Msg] Loaded level [124]
[Msg] Serving GUI information on [/world/tunnel_circuit_practice_03/gui/info]
[Msg] World [tunnel_circuit_practice_03] initialized with [1ms] physics profile.
[Dbg] [GazeboServer.cc:184] Loaded GazeboServer plugin.
[Msg] Found no publishers on /clock, adding root clock topic
[Dbg] [Manager.cc:773] Loading plugin. Name[subt::CommsBrokerPlugin] File[libCommsBrokerPlugin.so]
[Dbg] [CommsBrokerPlugin.cc:66] Loading visibility_config from SDF:
RF Configuration (visibility-based)
-- visibilityCostToFadingExponent: 0.2
-- commsCostMax: 15
[Dbg] [CommsBrokerPlugin.cc:90] Loading range_config from SDF:
RF Configuration (range-based)
-- max_range: 500
-- fading_exponent: 2.5
-- L0: 40
-- sigma: 10
[Dbg] [CommsBrokerPlugin.cc:115] Loading radio_config from SDF:
Radio Configuration
-- capacity: 1e+06
-- default_tx_power: 20
-- noise_floor: -90
-- modulation: QPSK
[Wrn] [OBJLoader.cc:79] Both d and Tr parameters defined for "Entrance". Use the value of d for dissolve (line 8 in .mtl.)
[Dbg] [SimulationFeatures.cc:45] Simulation timestep set to: 0.004
[Msg] Serving scene information on [/world/tunnel_circuit_practice_03/scene/info]
[Msg] Serving graph information on [/world/tunnel_circuit_practice_03/scene/graph]
[Msg] Serving full state on [/world/tunnel_circuit_practice_03/state]
[Msg] Publishing scene information on [/world/tunnel_circuit_practice_03/scene/info]
[Msg] Publishing entity deletions on [/world/tunnel_circuit_practice_03/scene/deletion]
[Msg] Publishing state changes on [/world/tunnel_circuit_practice_03/state]
[Msg] Publishing pose messages on [/world/tunnel_circuit_practice_03/pose/info]
[Msg] Publishing dynamic pose messages on [/world/tunnel_circuit_practice_03/dynamic_pose/info]
[GUI] [Dbg] [EntityComponentManager.cc:620] Using components of type [17121648710877364109] / [ign_gazebo_components.Geometry].
[GUI] [Dbg] [EntityComponentManager.cc:620] Using components of type [8064491505919932473] / [ign_gazebo_components.Level].
[GUI] [Dbg] [EntityComponentManager.cc:620] Using components of type [3297509811873971798] / [ign_gazebo_components.ParentEntity].
[GUI] [Dbg] [EntityComponentManager.cc:620] Using components of type [11371360182141354106] / [ign_gazebo_components.LevelEntityNames].
[GUI] [Dbg] [EntityComponentManager.cc:620] Using components of type [6612894081701502240] / [ign_gazebo_components.Pose].
[GUI] [Dbg] [EntityComponentManager.cc:620] Using components of type [13994732549916512682] / [ign_gazebo_components.Name].
[GUI] [Dbg] [EntityComponentManager.cc:620] Using components of type [4639224053471842703] / [ign_gazebo_components.LevelBuffer].
[GUI] [Dbg] [EntityComponentManager.cc:620] Using components of type [9225962031573086509] / [ign_gazebo_components.CollisionElement].
[GUI] [Dbg] [EntityComponentManager.cc:620] Using components of type [17938588655714334139] / [ign_gazebo_components.Collision].
[GUI] [Dbg] [EntityComponentManager.cc:620] Using components of type [6687176221774458630] / [ign_gazebo_components.Model].
[GUI] [Dbg] [EntityComponentManager.cc:620] Using components of type [8546580419506082455] / [ign_gazebo_components.Static].
[GUI] [Dbg] [EntityComponentManager.cc:620] Using components of type [9712747055438129860] / [ign_gazebo_components.WindMode].
[GUI] [Dbg] [EntityComponentManager.cc:620] Using components of type [10522242218202596205] / [ign_gazebo_components.CanonicalLink].
[GUI] [Dbg] [EntityComponentManager.cc:620] Using components of type [8112400427272910195] / [ign_gazebo_components.Inertial].
[GUI] [Dbg] [EntityComponentManager.cc:620] Using components of type [5081358965268446661] / [ign_gazebo_components.Link].
[GUI] [Dbg] [EntityComponentManager.cc:620] Using components of type [16454635107327670381] / [ign_gazebo_components.Visual].
[GUI] [Dbg] [EntityComponentManager.cc:620] Using components of type [2668898242563798256] / [ign_gazebo_components.DefaultLevel].
[GUI] [Dbg] [EntityComponentManager.cc:620] Using components of type [12592746352568925681] / [ign_gazebo_components.Gravity].
[GUI] [Dbg] [EntityComponentManager.cc:620] Using components of type [13224937992534617849] / [ign_gazebo_components.MagneticField].
[GUI] [Dbg] [EntityComponentManager.cc:620] Using components of type [17100615127981600159] / [ign_gazebo_components.Scene].
[GUI] [Dbg] [EntityComponentManager.cc:620] Using components of type [2251689575469537287] / [ign_gazebo_components.World].
[GUI] [Dbg] [EntityComponentManager.cc:620] Using components of type [15943768124495574352] / [ign_gazebo_components.WorldLinearVelocitySeed].
[GUI] [Dbg] [EntityComponentManager.cc:620] Using components of type [12173050716021724529] / [ign_gazebo_components.WorldLinearVelocity].
[GUI] [Dbg] [EntityComponentManager.cc:620] Using components of type [8753193699724811771] / [ign_gazebo_components.Wind].
[GUI] [Wrn] [OBJLoader.cc:79] Both d and Tr parameters defined for "Entrance". Use the value of d for dissolve (line 8 in .mtl.)
[Dbg] [CommsBrokerPlugin.cc:210] Using [visibility_range] comms model
[Msg] Starting SubT comms broker
[Dbg] [Manager.cc:773] Loading plugin. Name[subt::BaseStationPlugin] File[libBaseStationPlugin.so]
[Msg] Base station plugin loaded
[Msg] Storing callback for base_station:4000
[Msg] Storing callback for broadcast:4000
[Msg] Storing callback for base_station:4100
[Msg] Storing callback for broadcast:4100
[Dbg] [Manager.cc:773] Loading plugin. Name[ignition::launch::GazeboFactory] File[libignition-launch-gazebo-factory.so]
[Dbg] [GazeboFactory.cc:140] Factory service call succeeded.
[Dbg] [EntityComponentManager.cc:620] Using components of type [3866641186784191835] / [ign_gazebo_components.Light].
[Dbg] [EntityComponentManager.cc:620] Using components of type [273039548655896271] / [ign_gazebo_components.Sensor].
[Dbg] [EntityComponentManager.cc:620] Using components of type [17771214158902094494] / [ign_gazebo_components.Imu].
[Dbg] [EntityComponentManager.cc:620] Using components of type [10461520141335422054] / [ign_gazebo_components.WorldPose].
[Dbg] [EntityComponentManager.cc:620] Using components of type [9810498410555695050] / [ign_gazebo_components.AngularVelocity].
[Dbg] [EntityComponentManager.cc:620] Using components of type [17373107141547024696] / [ign_gazebo_components.LinearAcceleration].
[Dbg] [EntityComponentManager.cc:620] Using components of type [14624144930658477562] / [ign_gazebo_components.Camera].
[Dbg] [EntityComponentManager.cc:620] Using components of type [1301926277928136113] / [ign_gazebo_components.GpuLidar].
[Dbg] [EntityComponentManager.cc:620] Using components of type [360894313363162387] / [ign_gazebo_components.Joint].
[Dbg] [EntityComponentManager.cc:620] Using components of type [4514298940308304267] / [ign_gazebo_components.JointType].
[Dbg] [EntityComponentManager.cc:620] Using components of type [16752981946841796574] / [ign_gazebo_components.JointAxis].
[Dbg] [EntityComponentManager.cc:620] Using components of type [6791213906290467105] / [ign_gazebo_components.ThreadPitch].
[Dbg] [EntityComponentManager.cc:620] Using components of type [14863055383328686534] / [ign_gazebo_components.ParentLinkName].
[Dbg] [EntityComponentManager.cc:620] Using components of type [3888602368311486678] / [ign_gazebo_components.ChildLinkName].
[Msg] DiffDrive subscribing to twist messages on [/model/X1/cmd_vel_relay]
[Dbg] [SimulationRunner.cc:580] Loaded system [ignition::gazebo::systems::DiffDrive] for entity [294]
[Dbg] [SimulationRunner.cc:580] Loaded system [ignition::gazebo::systems::PosePublisher] for entity [294]
[Dbg] [EntityComponentManager.cc:620] Using components of type [4154590335585354845] / [ign_gazebo_components.BatterySoC].
[Dbg] [LinearBatteryPlugin.cc:246] Start draining only on motion
[Msg] LinearBatteryPlugin configured. Battery name: linear_battery
[Dbg] [LinearBatteryPlugin.cc:253] Battery initial voltage: 12.694
[Dbg] [SimulationRunner.cc:580] Loaded system [ignition::gazebo::systems::LinearBatteryPlugin] for entity [294]
[Dbg] [UserCommands.cc:488] Created entity [294] named [X1]
[Msg] Loading plugin [ignition-rendering2-ogre2]
[Dbg] [RenderUtil.cc:786] Create scene [scene]
[Msg] Publishing laser scans on [world/tunnel_circuit_practice_03/model/X1/link/base_link/sensor/front_laser/scan]
[Dbg] [EntityComponentManager.cc:620] Using components of type [14423792621074650228] / [ign_gazebo_components.JointVelocityCmd].
[Dbg] [EntityComponentManager.cc:620] Using components of type [9436740692853731264] / [ign_gazebo_components.JointPosition].
[GUI] [Dbg] [EntityComponentManager.cc:620] Using components of type [3866641186784191835] / [ign_gazebo_components.Light].
[GUI] [Dbg] [EntityComponentManager.cc:620] Using components of type [17771214158902094494] / [ign_gazebo_components.Imu].
[GUI] [Dbg] [EntityComponentManager.cc:620] Using components of type [273039548655896271] / [ign_gazebo_components.Sensor].
[GUI] [Dbg] [EntityComponentManager.cc:620] Using components of type [17373107141547024696] / [ign_gazebo_components.LinearAcceleration].
[GUI] [Dbg] [EntityComponentManager.cc:620] Using components of type [9810498410555695050] / [ign_gazebo_components.AngularVelocity].
[GUI] [Dbg] [EntityComponentManager.cc:620] Using components of type [10461520141335422054] / [ign_gazebo_components.WorldPose].
[GUI] [Dbg] [EntityComponentManager.cc:620] Using components of type [14624144930658477562] / [ign_gazebo_components.Camera].
[GUI] [Dbg] [EntityComponentManager.cc:620] Using components of type [1301926277928136113] / [ign_gazebo_components.GpuLidar].
[GUI] [Dbg] [EntityComponentManager.cc:620] Using components of type [16752981946841796574] / [ign_gazebo_components.JointAxis].
[GUI] [Dbg] [EntityComponentManager.cc:620] Using components of type [360894313363162387] / [ign_gazebo_components.Joint].
[GUI] [Dbg] [EntityComponentManager.cc:620] Using components of type [3888602368311486678] / [ign_gazebo_components.ChildLinkName].
[GUI] [Dbg] [EntityComponentManager.cc:620] Using components of type [4514298940308304267] / [ign_gazebo_components.JointType].
[GUI] [Dbg] [EntityComponentManager.cc:620] Using components of type [14863055383328686534] / [ign_gazebo_components.ParentLinkName].
[GUI] [Dbg] [EntityComponentManager.cc:620] Using components of type [6791213906290467105] / [ign_gazebo_components.ThreadPitch].
[GUI] [Dbg] [EntityComponentManager.cc:620] Using components of type [4154590335585354845] / [ign_gazebo_components.BatterySoC].
[GUI] [Dbg] [EntityComponentManager.cc:620] Using components of type [14423792621074650228] / [ign_gazebo_components.JointVelocityCmd].
[GUI] [Dbg] [EntityComponentManager.cc:620] Using components of type [9436740692853731264] / [ign_gazebo_components.JointPosition].
[Dbg] [Manager.cc:421] Death of process[5733] with name[x1_description].
[Dbg] [EntityComponentManager.cc:620] Using components of type [4425034272867445569] / [ign_gazebo_components.Performer].
[Dbg] [EntityComponentManager.cc:620] Using components of type [11311330372155309806] / [ign_gazebo_components.PerformerLevels].
[Dbg] [EntityComponentManager.cc:620] Using components of type [9853217982010720764] / [ign_gazebo_components.Material].
[Msg] Loaded level [25]
[Msg] Loaded level [26]
[Msg] Loaded level [29]
[Msg] Loaded level [30]
[Msg] Loaded level [31]
[Msg] Loaded level [32]
[Msg] Loaded level [33]
[Msg] Loaded level [34]
[Msg] Loaded level [36]
[Msg] Loaded level [58]
[Msg] Loaded level [59]
[Msg] Loaded level [60]
[Msg] Loaded level [87]
[Msg] Loaded level [88]
[Wrn] [ColladaLoader.cc:2144] Triangle input semantic: 'COLOR' is currently not supported
[Wrn] [ColladaLoader.cc:2144] Triangle input semantic: 'COLOR' is currently not supported
[Wrn] [ColladaLoader.cc:2144] Triangle input semantic: 'COLOR' is currently not supported
[Wrn] [ColladaLoader.cc:2144] Triangle input semantic: 'COLOR' is currently not supported
[Wrn] [ColladaLoader.cc:2144] Triangle input semantic: 'COLOR' is currently not supported
[Wrn] [ColladaLoader.cc:2144] Triangle input semantic: 'COLOR' is currently not supported
[Wrn] [ColladaLoader.cc:2144] Triangle input semantic: 'COLOR' is currently not supported
[Wrn] [ColladaLoader.cc:2144] Triangle input semantic: 'COLOR' is currently not supported
[Wrn] [ColladaLoader.cc:2144] Triangle input semantic: 'COLOR' is currently not supported
[Wrn] [ColladaLoader.cc:2144] Triangle input semantic: 'COLOR' is currently not supported
[GUI] [Dbg] [EntityComponentManager.cc:620] Using components of type [9853217982010720764] / [ign_gazebo_components.Material].
[GUI] [Dbg] [EntityComponentManager.cc:620] Using components of type [4425034272867445569] / [ign_gazebo_components.Performer].
[GUI] [Dbg] [EntityComponentManager.cc:620] Using components of type [11311330372155309806] / [ign_gazebo_components.PerformerLevels].
[GUI] [Wrn] [ColladaLoader.cc:2144] Triangle input semantic: 'COLOR' is currently not supported
[GUI] [Wrn] [ColladaLoader.cc:2144] Triangle input semantic: 'COLOR' is currently not supported
[GUI] [Wrn] [ColladaLoader.cc:2144] Triangle input semantic: 'COLOR' is currently not supported
[GUI] [Wrn] [ColladaLoader.cc:2144] Triangle input semantic: 'COLOR' is currently not supported
osrf-migration
commented
5 years ago Original comment by Carlos Thomson (Bitbucket: Carlos Thomson).
Let me point out that rendering inside the docker image is working in the same machine.
osrf-migration
commented
5 years ago Original comment by Alfredo Bencomo (Bitbucket: bencomo).
Thanks Carlos, that is expected since the docker image self contain all the models.
Unfortunately, I cannot reproduce the behavior you are reporting with the catkin workspace. Are you okay using the docker image instead? That is recommended choice.
osrf-migration
commented
5 years ago Original comment by Carlos Thomson (Bitbucket: Carlos Thomson).
It is truly inconvenient to develop inside the docker image. Have you tried to reproduce the wiki instructions on how to develop using a catkin_workspace from a clean installed machine? Please let me now if I can help you debug this.
osrf-migration
commented
5 years ago Original comment by Alfredo Bencomo (Bitbucket: bencomo).
Carlos, I’m quite familiar with those wiki instructions. Notice that you don’t need to do development from inside a docker container (see link below).
https://osrf-migration.github.io/subt-gh-pages/#!/osrf/subt/wiki/tutorials/cloudsim
osrf-migration
commented
5 years ago Original comment by Carlos Thomson (Bitbucket: Carlos Thomson).
Alfredo, by no means, I didn’t mean to imply the contrary.
The reason for my concern, is that you have different versions of the same packages inside the docker container and the system installation (plus a bunch of different steps in the docker file)
We are aware of the cloudsim option, but it still problematic for us. For debugging purposes, we add plugins to the simulation and modify the existing ones. Using the cloudsim simulation does not allow us to use these dynamically loaded plugins.
We also have a continuous integration framework that requires us to work with the catkin workspace.
In summary, we need to have something as basic as the simulation working in our systems running natively, not though a docker system.
If you confirm me that this is a problem of our hardware setup we will proceed to buy new hardware in order to fix the issue, but please confirm me that this is the case, and what is the exact hardware setup that you recommend, for example, the one that you are using.
Needless to say that there is no documentation on the docker files that you are using, neither on how to extend them.
osrf-migration
commented
5 years ago Original comment by Arthur Schang (Bitbucket: Arthur Schang).
Carlos Thomson (Carlos Thomson) I have some documentation on how to extend their docker image and a developmental docker image (i.e. mount your files from your host OS into a docker image and then catkin_build in there) over on the subt_hello_world repository located here.
Maybe that documentation on the proposed development workflow will be useful for you but I don’t think it’s exactly what you’re looking for so you’re going to have to do some modifications on your own or go further in-depth on how you’re using plugins.
Also, this isn’t an appetizing option but if it works inside of the Docker, I bet it would work if you tried it on a fresh 18.04 installation.
osrf-migration
commented
5 years ago Original comment by Carlos Thomson (Bitbucket: Carlos Thomson).
Thank you @Arthur Schang , with your information we have a temporally solution for development.
While the rendering seems correct, the practice maps seem all messed up, the images don’t coincide with the ones in the wiki, and the tunnels seem to be incomplete and disconnected, see the attached image.
We are using the latest osrf/subt-virtual-testbed docker image. @Alfredo Bencomo is this behavior normal? we are using the docker image with the command:
./run.bash osrf/subt-virtual-testbed tunnel_circuit_practice.ign robotName1:=X1 robotConfig1:=X1_SENSOR_CONFIG_1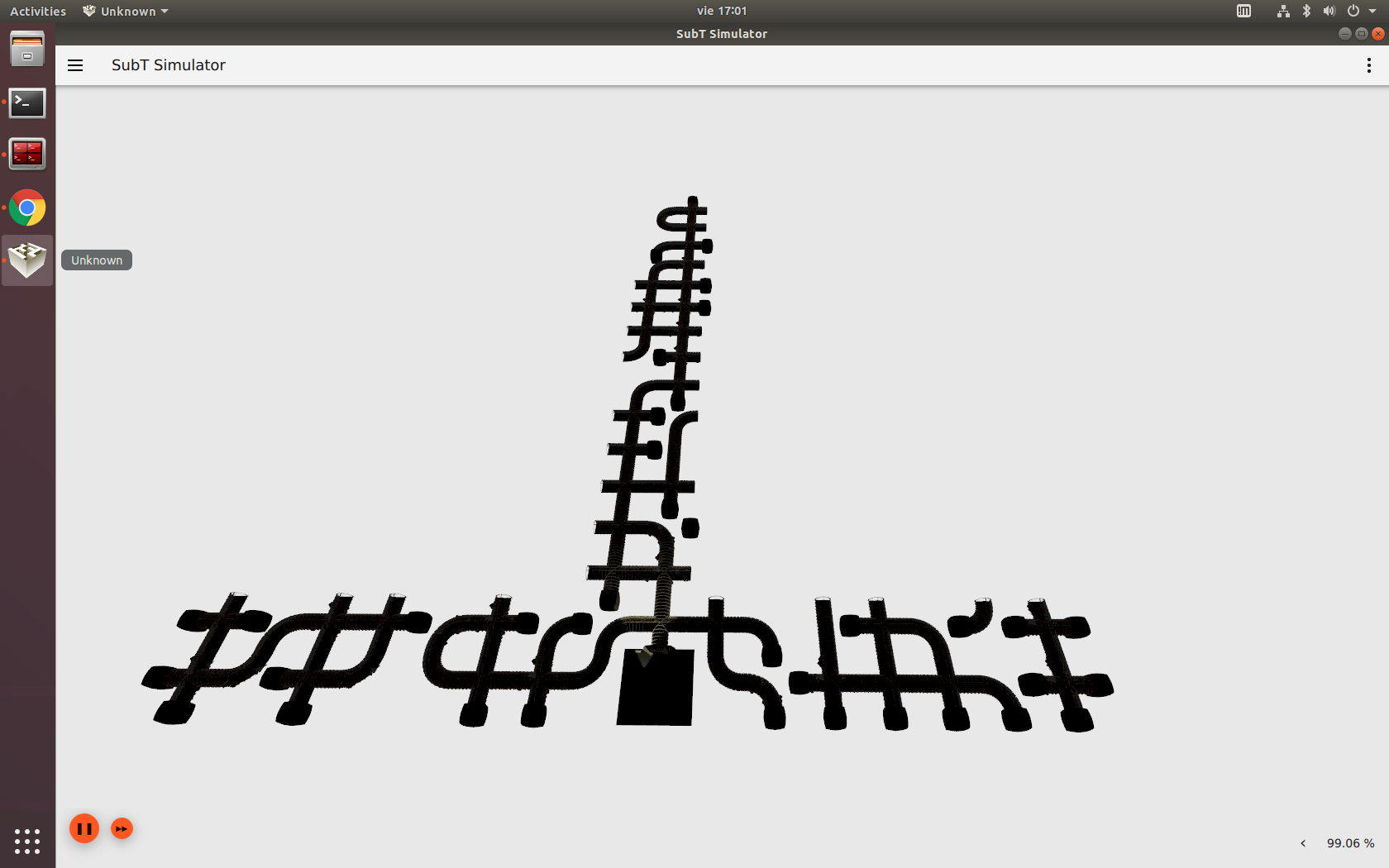
osrf-migration
commented
5 years ago osrf-migration
commented
5 years ago osrf-migration
commented
4 years ago
Original report (archived issue) by Anonymous.
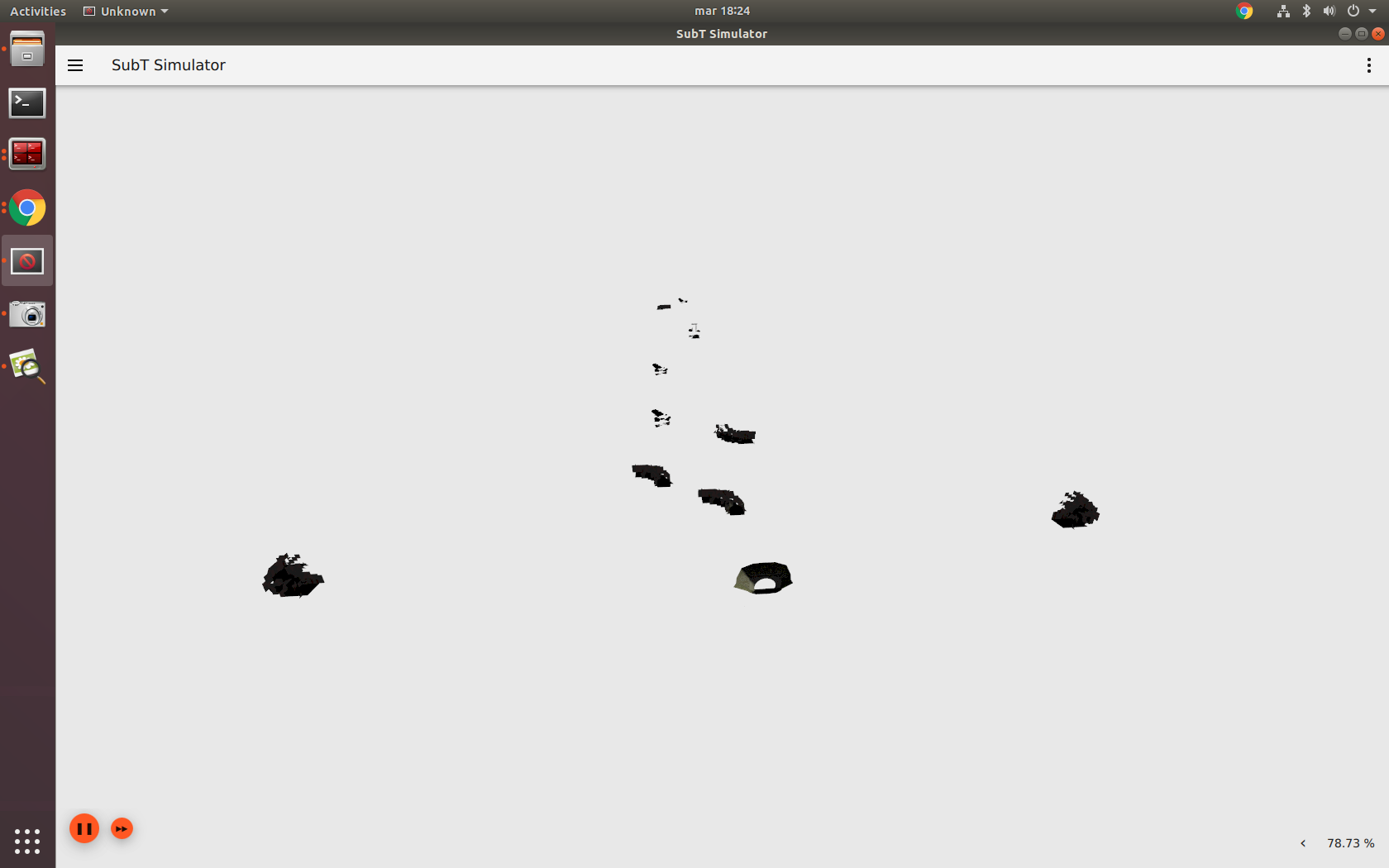
The original report had attachments: problem rendering ignition.png
I have a fresh installed a 18.04 machine, and followed the instructions for Catkin workspace setup: https://osrf-migration.github.io/subt-gh-pages/#!/osrf/subt/wiki/tutorials/SystemSetupInstall
Ignition is not able to render properly, see the attached image.