 osrf-migration
commented
5 years ago
osrf-migration
commented
5 years ago Original comment by Martin Dlouhy (Bitbucket: robotikacz).
In working example has the bridge this output:
ROS_MASTER_URI=http://localhost:11311
No processes to monitor
shutting down processing monitor...
process[subt_ros_relay-3]: started with pid [98]
... shutting down processing monitor complete
process[X2L/ros1_ign_bridge_imu-1]: started with pid [121]
[Dbg] [Manager.cc:421] Death of process[52] with name[x2_description].
process[tf_world_static-4]: started with pid [130]
process[X2L/ros1_ign_bridge_pose-2]: started with pid [152]
process[X2L/ros1_ign_bridge_twist-3]: started with pid [171]
process[X2L/ros1_ign_bridge_camera-4]: started with pid [184]
process[X2L/ros1_ign_image_camera-5]: started with pid [197]
process[X2L/ros1_ign_bridge_gpu_lidar-6]: started with pid [210]
process[X2L/ros1_ign_bridge_odom-7]: started with pid [227]
process[X2L/ros1_ign_bridge_battery_state-8]: started with pid [236]
process[X2L/pose_tf_broadcaster-9]: started with pid [249]… I just re-run all 3 dockers, no other change (I run them in sequence sim, bridge, solution, without too much delay) … here I can see different order or processes, does it matter? Is subt_ros_relay-3 important for something?
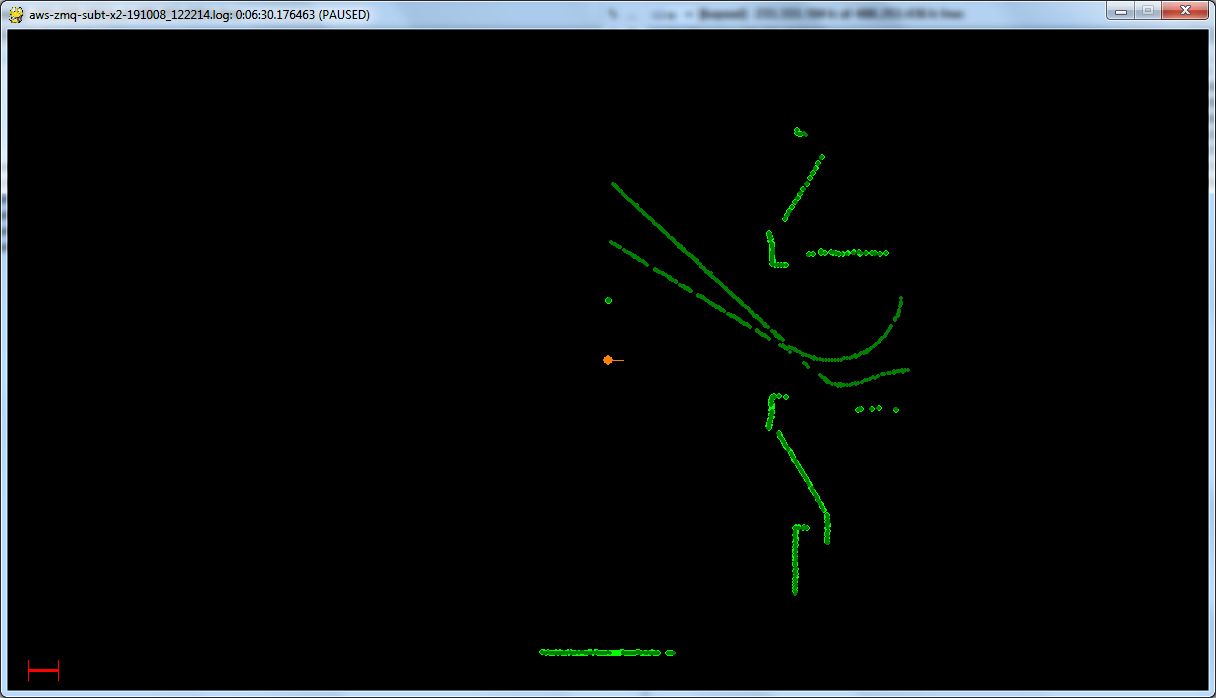 only robot D survived and recorded the other robots … you can see lidar trace of entering robot A and B and C not moving even after 6 minutes from start (real time)
only robot D survived and recorded the other robots … you can see lidar trace of entering robot A and B and C not moving even after 6 minutes from start (real time)
Original report (archived issue) by Martin Dlouhy (Bitbucket: robotikacz).
I originally suspected wrong configuration selection (#217), but I am much more careful now and never the less robot sometimes does not react??
I use 3 docker debug setup: sim, bridge and solution:
gpu@gpu-desktop:~/subt_testbed$ ./run.bash osrf/subt-virtual-testbed:cloudsim_sim_latest cloudsim_sim.ign worldName:=simple_tunnel_02 robotName1:=X2L robotConfig1:=X2_SENSOR_CONFIG_4gpu@gpu-desktop:~/subt_testbed$ ./run.bash osrf/subt-virtual-testbed:cloudsim_bridge_latest worldName:=simple_tunnel_02 robotName1:=X2L robotConfig1:=X2_SENSOR_CONFIG_4and 3rd is our docker based on
subt_seedexample.On the simulation terminal I see:
[Msg] Scoring has Startedbut nothing more although the robot should be already moving.
Bridge reports:
and the solution reports receiving of data:
but the robot is still at (0, 0, 0) even after 2 minutes of “simulation”??
Any hint what I should check? This happened to me alreaday say 5 times? I am in particular “scared” of necessary
sleep 30in example solution “to wait for bridge” … isn’t there also some other “timeout” when the solution has to respond after sim and bridge are started?p.s. the robot is sending turn command since the beginning: