 osrf-migration
commented
5 years ago
osrf-migration
commented
5 years ago Original comment by Neil Johnson (Bitbucket: realdealneil1980).
With a single agent, we were getting about equal performance on gazebo 9 versus ignition, but once we add more agents, the performance degrades more quickly on ignition.
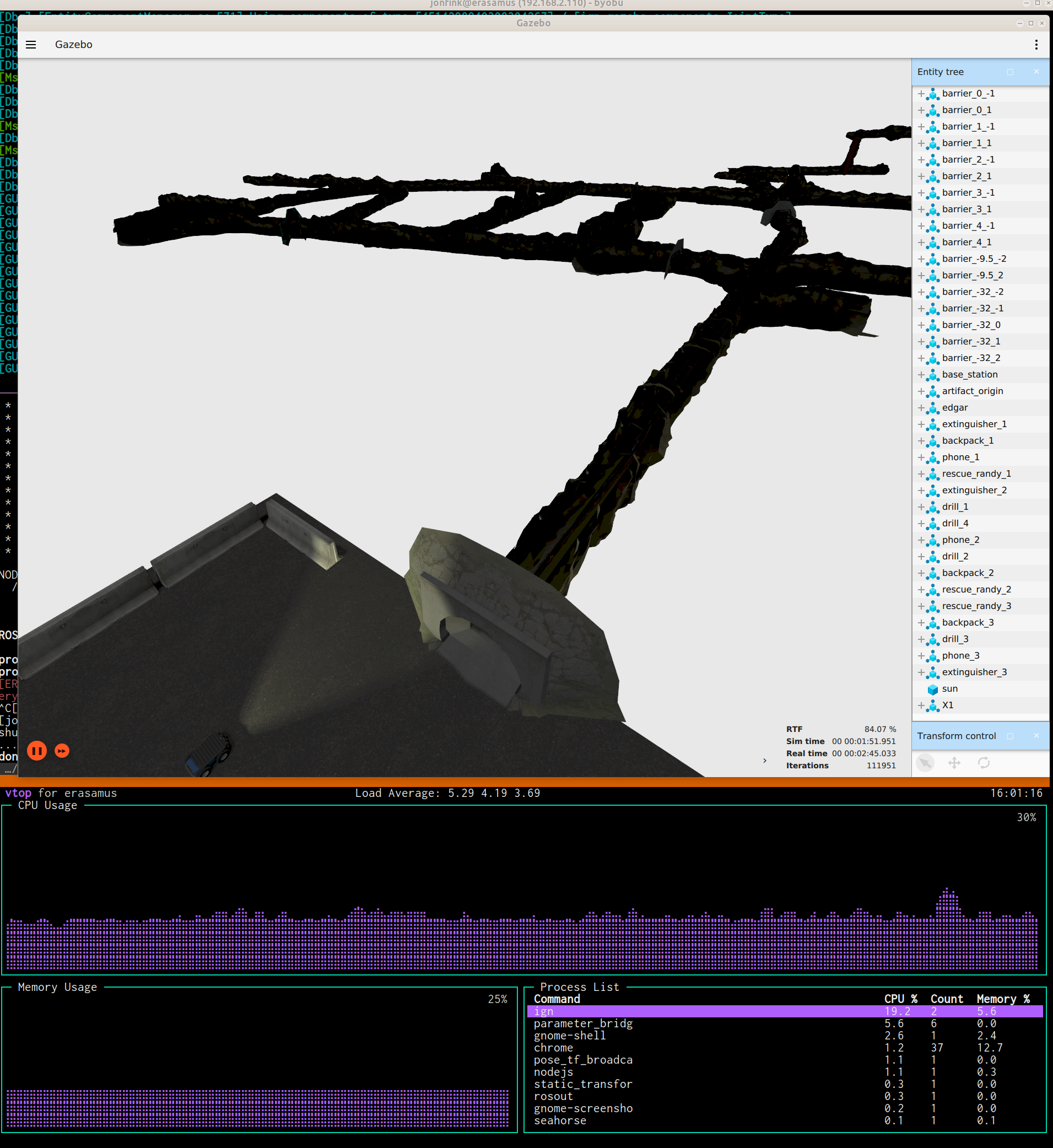
Original report (archived issue) by Jon Fink (Bitbucket: jonfink-arl).
Running
I’ve noticed that the performance of simulation is much slower than I would have anticipated: < 50% real time factor. On the same computer, with Gazebo 9, I was routinely running two robots with similar sensor configurations at 1.0 real time factor.
Is this expected?