 osrf-migration
commented
5 years ago
osrf-migration
commented
5 years ago Original comment by Jon Fink (Bitbucket: jonfink-arl).
It seems as though a fix is coming from upstream (https://github.com/osrf/ros1_ign_bridge/pull/21) but I believe this will also require an update to the ignition fuel models to add a snippet like this:
<plugin
filename="libRos1IgnPointCloud.so"
name="ros1_ign_point_cloud::PointCloud">
<namespace>custom_params</namespace>
<topic>points</topic>
<frame_id>custom_params/link</frame_id>
</plugin>to the appropriate SDF files.
I am also not sure the difference between the sensor types gpu_ray (current) and gpu_lidar (used in the examples provided in the above linked PR to ros1_ign_bridge)
Original report (archived issue) by Jon Fink (Bitbucket: jonfink-arl).
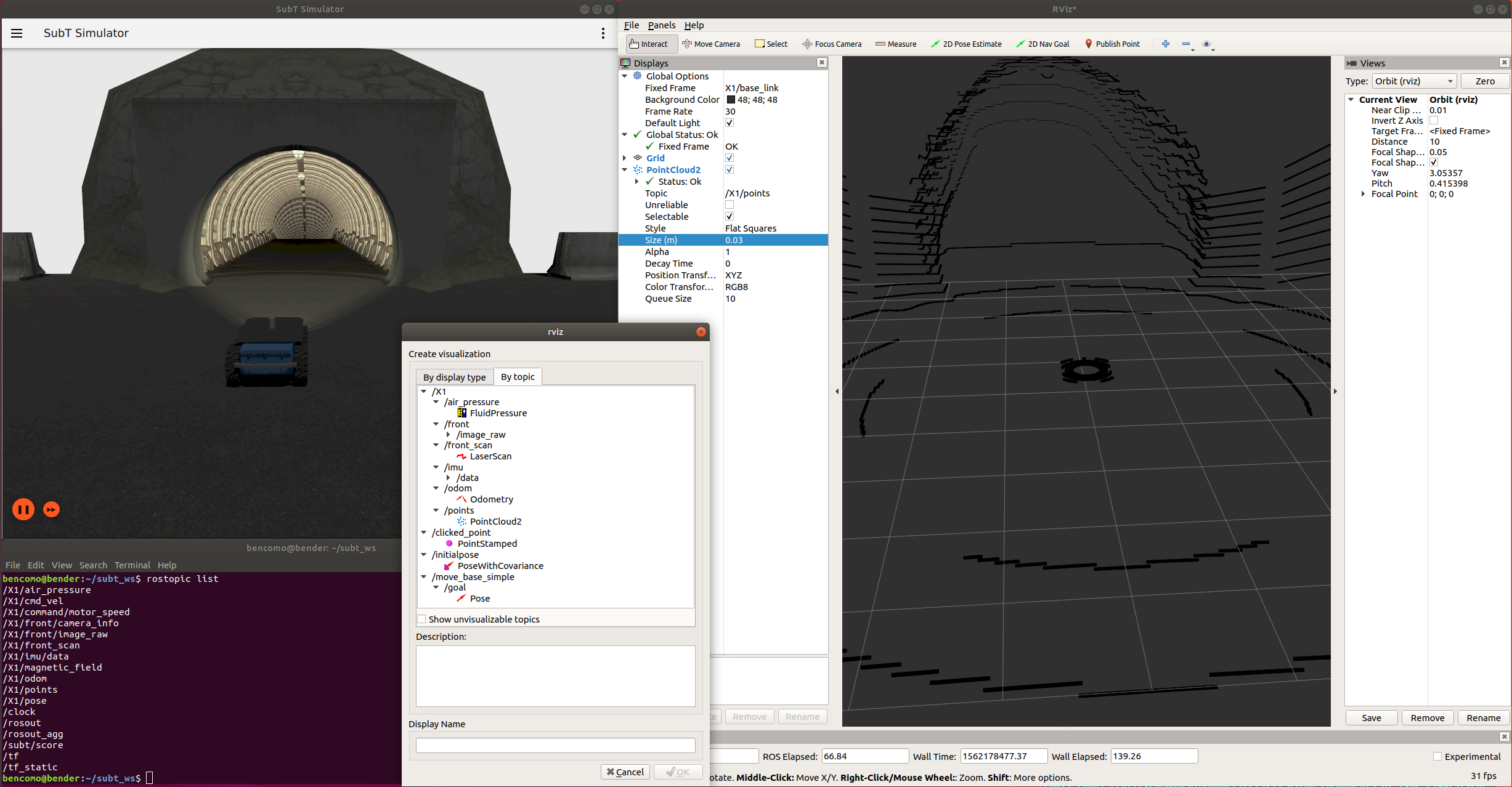
Configurations with 3D LIDAR (e.g., X1_CONFIG_4) are not properly populating a ROS topic with
sensor_msgs/PointCloud2data.