 bmagyar
commented
6 years ago
bmagyar
commented
6 years ago Not really...Actually the current version should support Indigo more and is less ideal for Kinetic.
On 13 December 2017 at 01:34, Vivek Annem notifications@github.com wrote:
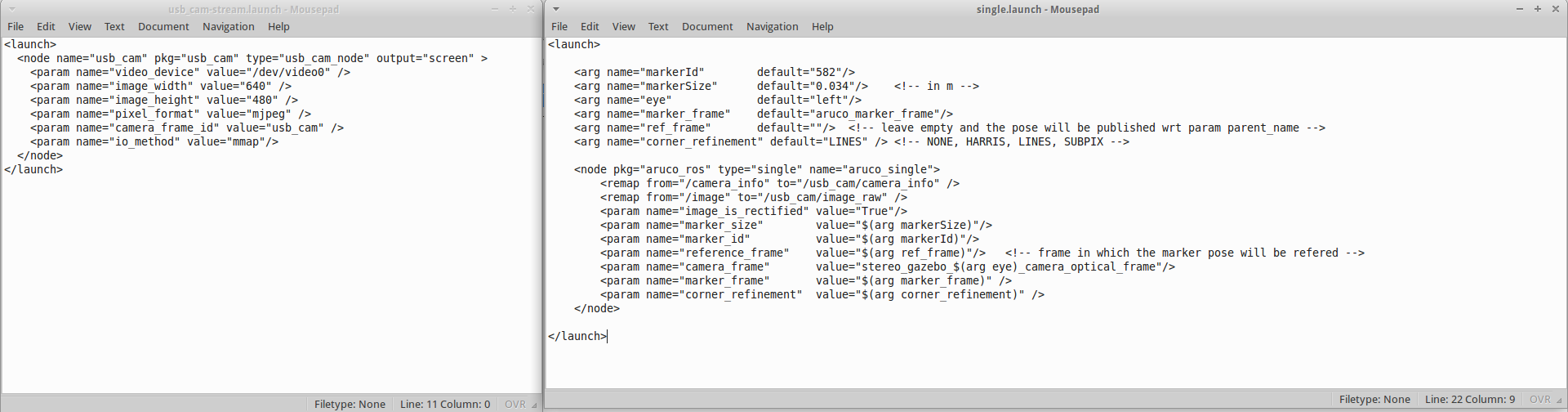
This was working fine on kinetic. I needed it on indigo. Here are the launch files and the errors i am getting. Anyone know what the issue might be?
Thanks in advance.
[image: main_error] https://user-images.githubusercontent.com/14225433/33917351-a19d7c28-df62-11e7-9134-970a85c67bb3.png [image: single_and_usbcamstream] https://user-images.githubusercontent.com/14225433/33917352-a1b51e64-df62-11e7-9f7c-d392ed202a06.png
— You are receiving this because you are subscribed to this thread. Reply to this email directly, view it on GitHub https://github.com/pal-robotics/aruco_ros/issues/38, or mute the thread https://github.com/notifications/unsubscribe-auth/ADXH4cYQ74QPUUto9Ns8zT2QOzUqyOYiks5s_ymRgaJpZM4Q_4hJ .
 LeLiPepsi
LeLiPepsi{kind=link}
{kind=link}
This was working fine on kinetic. I needed it on indigo. Here are the launch files and the errors i am getting. Anyone know what the issue might be?
Thanks in advance.