 martial-dong
commented
5 years ago
martial-dong
commented
5 years ago 您好,您讲解的非常清晰,感谢!我有一个小问题,车辆行驶的时候前面可能有其他车辆,我会根据前车的速度决定跟车或者变道超车,请问这个功能在程序里是哪块实现的呢?谢谢!
Open paulQuei opened 5 years ago
martial-dong
commented
5 years ago 您好,您讲解的非常清晰,感谢!我有一个小问题,车辆行驶的时候前面可能有其他车辆,我会根据前车的速度决定跟车或者变道超车,请问这个功能在程序里是哪块实现的呢?谢谢!
 mickeyouyou
commented
5 years ago
mickeyouyou
commented
5 years ago @martial-dong 您好,您讲解的非常清晰,感谢!我有一个小问题,车辆行驶的时候前面可能有其他车辆,我会根据前车的速度决定跟车或者变道超车,请问这个功能在程序里是哪块实现的呢?谢谢!
将车道上包含预测信息的障碍物映射到坐标,然后在规划中作为约束条件。预测模块中预测,规划中给出横纵向决策。
 paulQuei
commented
5 years ago
paulQuei
commented
5 years ago @mickeyouyou
@martial-dong 您好,您讲解的非常清晰,感谢!我有一个小问题,车辆行驶的时候前面可能有其他车辆,我会根据前车的速度决定跟车或者变道超车,请问这个功能在程序里是哪块实现的呢?谢谢!
将车道上包含预测信息的障碍物映射到坐标,然后在规划中作为约束条件。预测模块中预测,规划中给出横纵向决策。
👍
 witcher-joey
commented
4 years ago
witcher-joey
commented
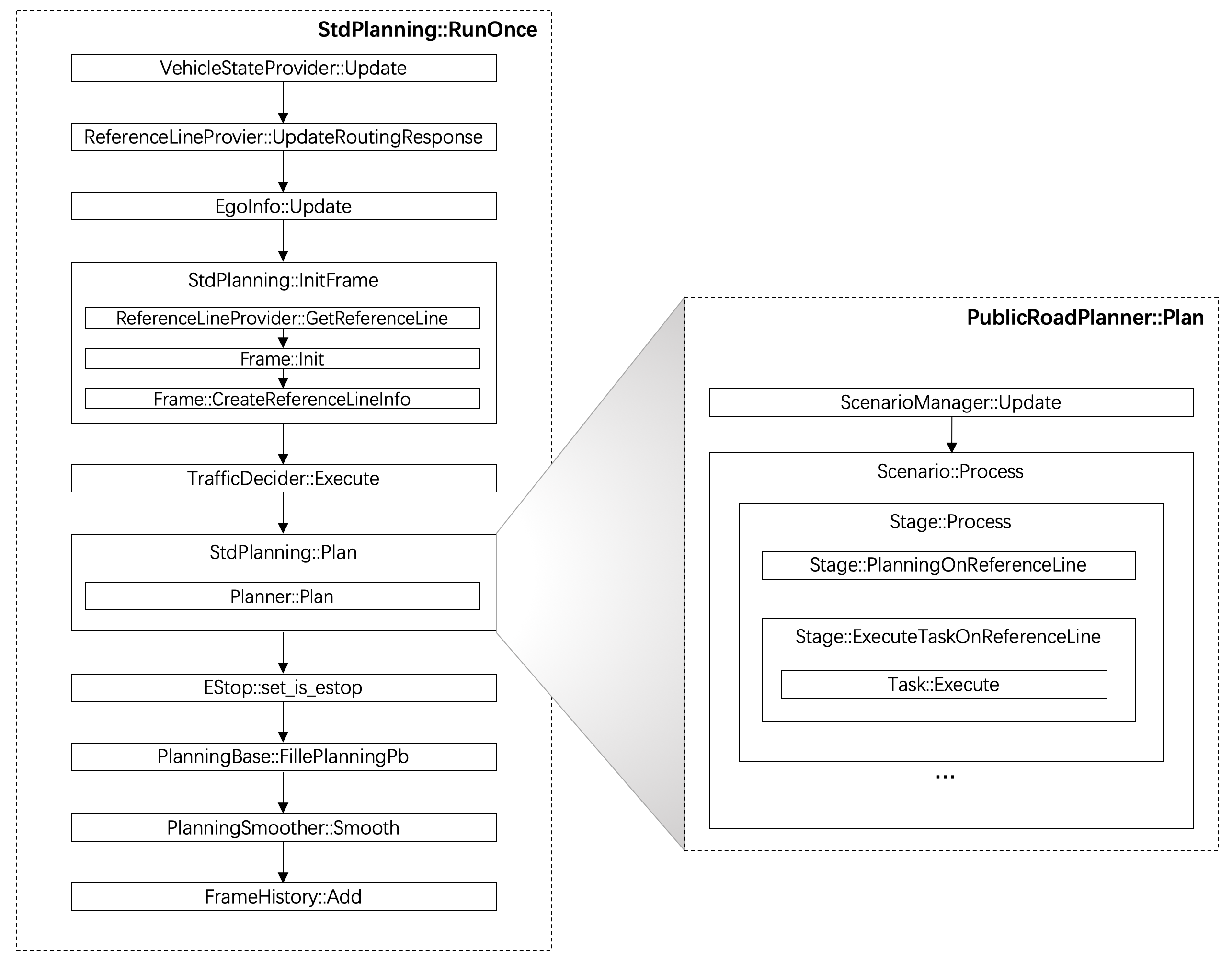
4 years ago 作者您好!请问下在3.5 public_road_planner.cc里面为什么代码那么少,是没有写完整还是其他原因? 与3.0的相比路径和速度求解过程的代码没有体现出来。
 zwkcoding
commented
4 years ago
zwkcoding
commented
4 years ago 保罗兄:
 paulQuei
commented
4 years ago
paulQuei
commented
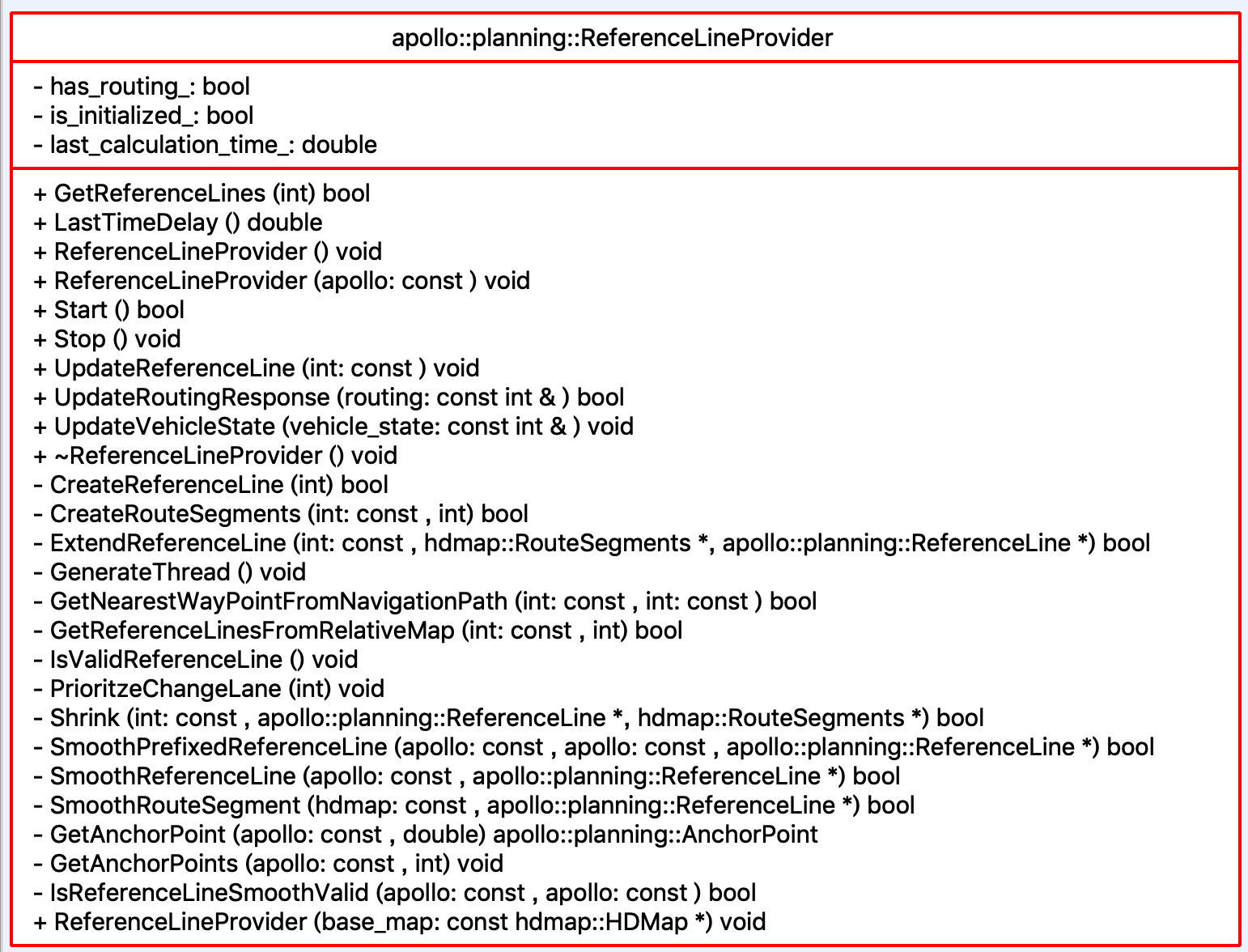
4 years ago 文中的图片大部分是用PowerPoint画的。譬如你提的第一张图。 第二张图是Scitool Understand工具自动生成的。
@zwkcoding 保罗兄:
- 感谢你的文章
- 文章中的图片是用什么画的
zwkcoding
commented
4 years ago 感谢 @paulQuei
另外, 挺好奇, 你的博客文章是写在 github issue 里面的, 如何托管到你的博客的呢?
给个关键词即可, 再次感谢
paulQuei
commented
4 years ago 博客用的是: https://pages.github.com ,自己买的域名。 评论框用的一个插件。
@zwkcoding 感谢 @paulQuei
另外, 挺好奇, 你的博客文章是写在 github issue 里面的, 如何托管到你的博客的呢?
给个关键词即可, 再次感谢
 starrye
commented
1 year ago
starrye
commented
1 year ago 哈喽 看到您这边的文章 想请教您一个问题 目前我只接入apollo v7的规划 但会车辆前后晃动的问题 经过排查发现apollo的planning通道会返回 ADCTrajectory.trajectory_point 多个规划点信息 我之前按照relative_time接近0取坐标,但是有点问题,请问我该如何选取planning给我返回的数组中坐标点?
https://paul.pub/apollo-planning/
解析百度Apollo之决策规划模块, AI, Apollo,Planning,Planner,Trajectory, 本文是Apollo项目系列文章中的一篇,会解析自动驾驶系统中最核心的模块 - 决策规划模块。