 zwkcoding
commented
6 years ago
zwkcoding
commented
6 years ago Did you see the wiki about costmap_2d here?
map_[nbr] < INSCRIBED_INFLATED_OBSTACLE doesn't mean these positions are absolutely safe, it maybe in collision.
In my opinion, map_[nbr] <= map_[idx] could be replaced with FREE_SPACE == map_[nbr], here, the intention is to find the absolutely safe area.
If I am wrong, please point it out directly ;) @pengjiawei
 paulbovbel
paulbovbel pengjiawei
pengjiawei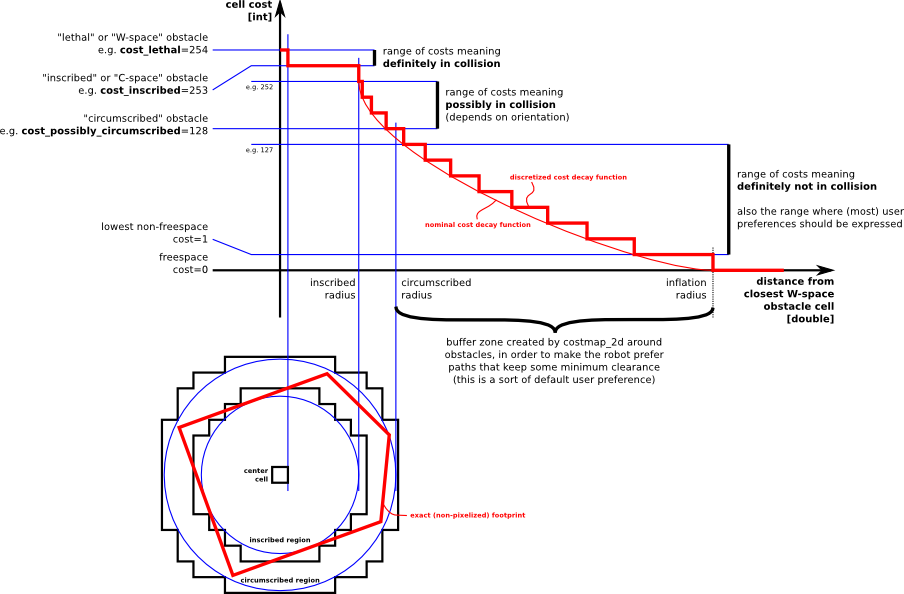{kind=link}
i have a little bit of confusion about line 61 in frontiersearch.cpp `map[nbr] <= map_[idx]
We have found the variable idx ,it is the FREE_SPACE that is nearest to the start. nbr is the nhood4 for idx. On my opinion.it should bemap_[nbr] < INSCRIBED_INFLATEDOBSTACLEnotmap[nbr] <= map_[idx]` if we wanna search the free cell from the idx,because the cost values between 0 to 253 is free,is that right? I am not sure,I am looking forward to your reply,thank you !