 peng-zhihui
commented
2 years ago
peng-zhihui
commented
2 years ago 轨迹插值有一部分实现在驱动器内,控制器里面这个轨迹只做线性插值用于在两个MoveL指令间插值扩充指令频率到200Hz,另外这块我写完了还没时间测试,验证完成了会更新上来。
Open m986883511 opened 2 years ago
peng-zhihui
commented
2 years ago 轨迹插值有一部分实现在驱动器内,控制器里面这个轨迹只做线性插值用于在两个MoveL指令间插值扩充指令频率到200Hz,另外这块我写完了还没时间测试,验证完成了会更新上来。
 m986883511
commented
2 years ago
m986883511
commented
2 years ago 期待您的更新
m986883511
commented
2 years ago 在驱动器中的实现的线性插值代码,能指明一下在哪里吗?
还有一点建议:由于目前没有实现TRJ轨迹控制,建议您在Readme中标注位为 Todo。
peng-zhihui
commented
2 years ago 轨迹规划都在 2.Firmware\Ctrl-Step-Driver-STM32F1-fw\Ctrl\Motor\motion_planner.cpp文件里;意见已采纳
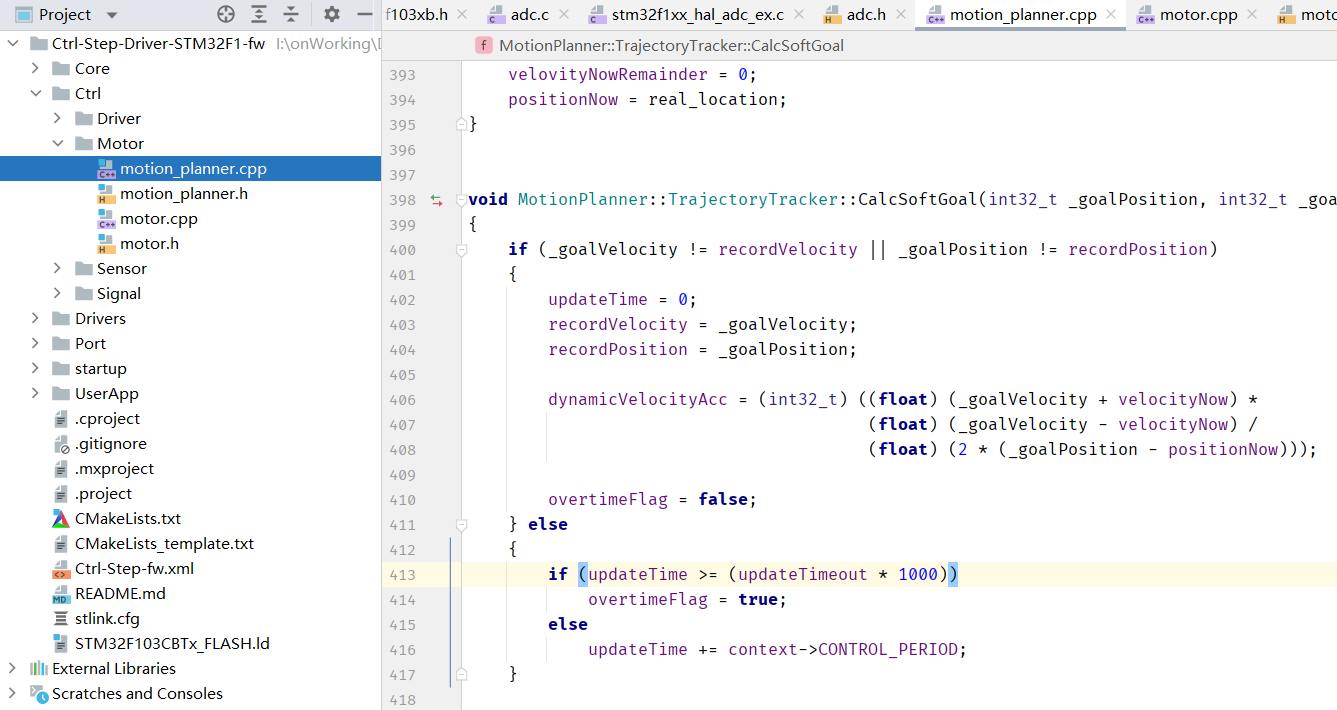
您在Readme中写支持TRJ轨迹跟踪,我想参考您的实现,我找到比较像的是如下代码?是空的啊,是我找错了吗? 麻烦指导一下。
目标函数地址: https://github.com/peng-zhihui/Dummy-Robot/blob/main/2.Firmware/Core-STM32F4-fw/Robot/instances/dummy_robot.cpp#L145