 aleneum
commented
3 years ago
aleneum
commented
3 years ago Hello @S1MP50N,
I appreciate I could solve this by adding an additional 'initial' state to the child FSM with a transition to 'doStuff' and adding an after callback. However, that would then put a dependency on the parent FSM to raise an additional child FSM specific event to cause the initial transition within the child.
When doStuff is your initial state, you can pass 'on_enter' callbacks that will only be called when the state is actually entered. This happens when a) ChildFSM transitions to doStuff or b) ParentFSM enters a state defined in ChildFSM. It will NOT be executed when ChildFSM is initialized since initial states are not entered. The model rather 'spawns' in it. The only thing you have to change is your state initialisation in ChildFSM:
# ...
states = [{'name': 'doStuff', 'on_enter': self.onEntry}, 'doOtherStuff', 'done']
# ...EDIT: Hmm... I checked the README and see that the ability to define states as dictionaries is not covered by the documentation. I will add that shortly.
 thedrow
thedrow S1MP50N
S1MP50N
Hi,
I am using nested FSMs, and I cannot find this documented, so raising as a potential feature request and/or looking for guidance on the best way to add this.
Take the following image as a simple example: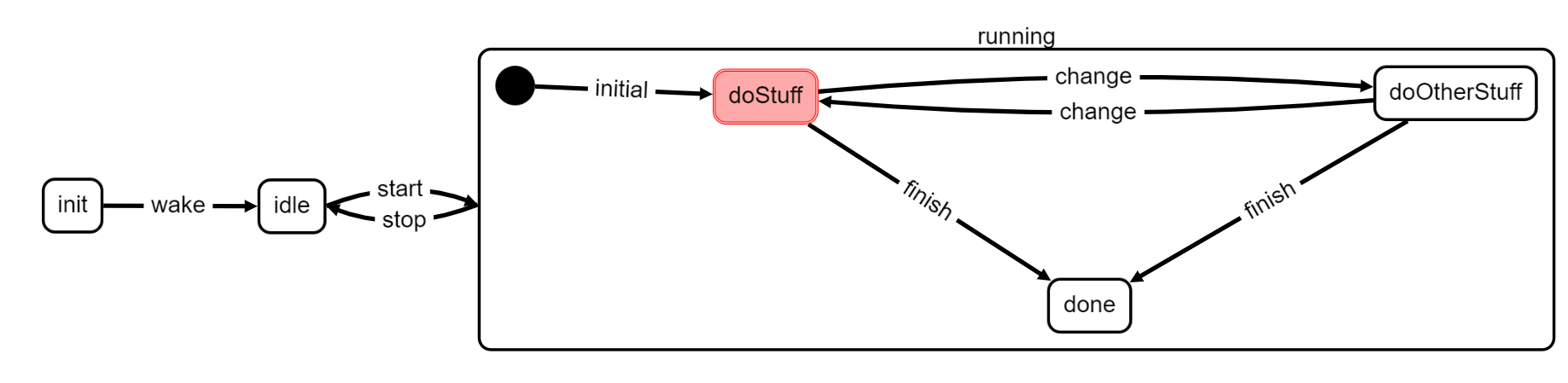
The code to create this looks like this:
I would like to be able to define a callback in the child FSM that is called when it is started by a parent FSM instantiating it. Something like this (note addition of onEntry on machine init and user onEntry function):
I appreciate I could solve this by adding an additional 'initial' state to the child FSM with a transition to 'doStuff' and adding an after callback. However, that would then put a dependency on the parent FSM to raise an additional child FSM specific event to cause the initial transition within the child. I don't think that feels very clean? Do you think it would be simple enough to add these callbacks?
Any help / advice appreciated.
Thanks, Shaun