 synersignart
commented
2 years ago
synersignart
commented
2 years ago also still getting problems of getting the mpu 9250 to work the Gyro, Mag and Acc on the Baro BMP280 goes on and off Version 5.0.0
also im getting CPU Load issue going pass 100%
just need support for amongst other things so we can have other sensor options MPU9250 MPU6000 AK8960 MMC5883
Id wish to have source avaiable to add
 Agusg666
Agusg666 rizacelik
rizacelik ahalsaqqa
ahalsaqqa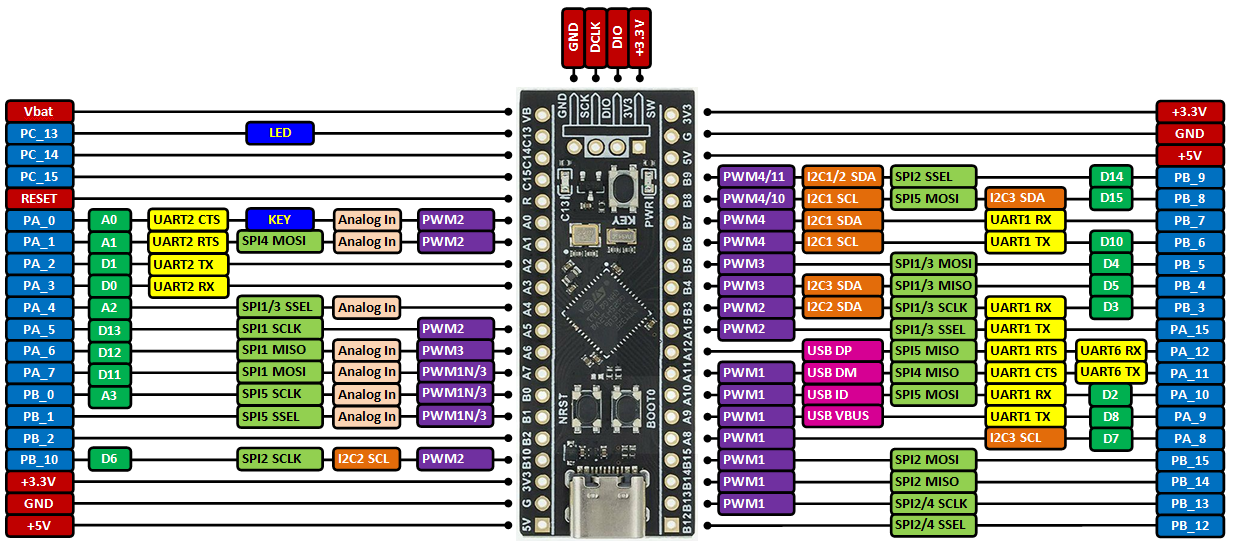{kind=link}
since the GPS taken up the UART1 A9 & A10TX1RX1 looking that I needed another UART serving as live telemetry and A2 & A3 Tx2 Rx2 Receiver PPM
I needed another telemetry port open is it possible to use B11 and B12 of TX6 RX6 or B6 and B7 of Tx1 RX1 how is this mapped out in the board and in the INAV configurator need clarification
would be nice if you could share the source code of the Build.sh and Src/Main/Target so other developers can add fixes to it