 BuildingAtom
commented
1 year ago
BuildingAtom
commented
1 year ago Hi @sevenzero70. I'm actually unsure of where those colors, specifically the yellow and orange come from. They don't line up to anything from our package alone, and the colors don't seem to line up to the boundaries of the elements. Is it possible you have something else being visualized which is overlapping the mesh resulting in the off colors? That should should a mostly pink mesh as the hill in spot_comp8.bag should mostly be uniformly classified. spot_comp3.bag which was previously provided may be a better example.
If you'd like to try with the bag from our demonstration video, this is the rosbag we collected from that run: spot_vid2.bag.
Since there was snow for this one, we use terrain_properties:=pascal_context.yaml, and semseg_config:=Encoding_ResNet50_PContext_full.yaml.
 sevenzero70
sevenzero70


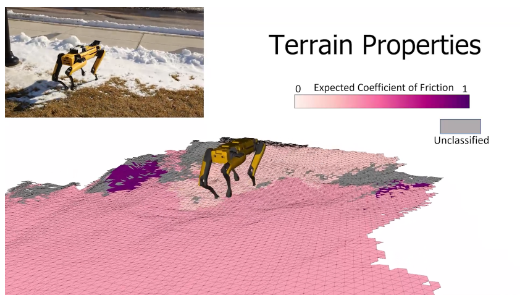
Sorry to bother you after a long time, I get part of the mapping effect when running “spot-comp8.bag” under the default configuration as shown in the figure, but the colors shown in the figure I only find that means the classification of the terrain category.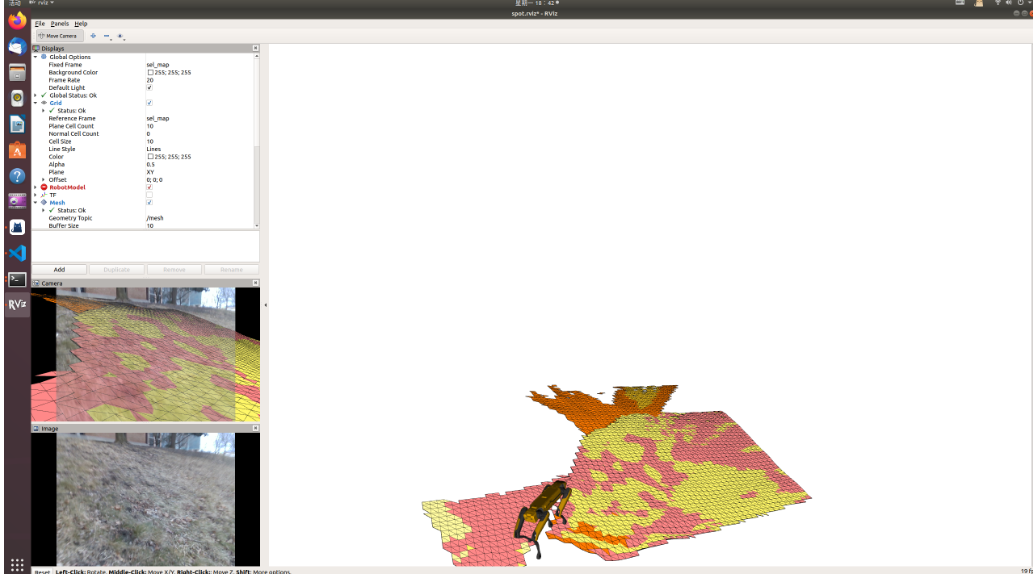 Besides I want to get an image similar to the second row of Figure 5 in your paper to represent the image of the coefficient of friction, like this.
Besides I want to get an image similar to the second row of Figure 5 in your paper to represent the image of the coefficient of friction, like this.
and what should I do?Maybe I can change something in elmap.py? Waiting for your reply, thanks.