temi is an unparalleled robotic platform introducing a new dimension of development - movement. Using temi’s SDK, developers can create new functionalities and introduce new use cases via temi’s Android tablet. temi’s movement and navigation capabilities run off of it's Linux computer and uses a set of 16 sensors including a Lidar, depth cameras, driving cameras, and microphones. We encourage our developer community to suggest and request expanded functionality within the SDK and we will adhere to your needs. We want to enable you to create skills like never seen before! We will be constantly improving the SDK and its documentation. Please feel free to reach out to us with any questions or thoughts at developers@robotemi.com
We has developed a program when the robot lift, there is alert msg sound out based on below sdk
override fun onRobotLifted(isLifted: Boolean, reason: String) {
}
It is working when temi lift and alert msg sound out. However, sometimes there is no robot lift and the robot just going to certain location then robot also trigger it is lifted. Any comment
Lift detection is relying on the sensors around the robot, and there might be false alerts.
In our app we are holding/debouncing every lift signal for in 3 seconds, we will release the signal that the robot is lifted or not lifted if no new signal is received after 3 seconds.
This might help to filter those false positive alerts.
We cannot tell a false alert, as it is sensor signals, can be affected by many things, maybe a piece of black floor that robot passed by.
What we did in temi app is we will wait for 3 more seconds as mentioned above for every true or false callback. and take the latest debounced result.
It is like postDelayed a 3-seconds message to emit the lifted event, during this 3 seconds, and false event will cancel the message, any new true event will cancel the message and create a new postDelayed message.
 zjn0505
commented
2 years ago
zjn0505
commented
2 years ago  iamkhan001
iamkhan001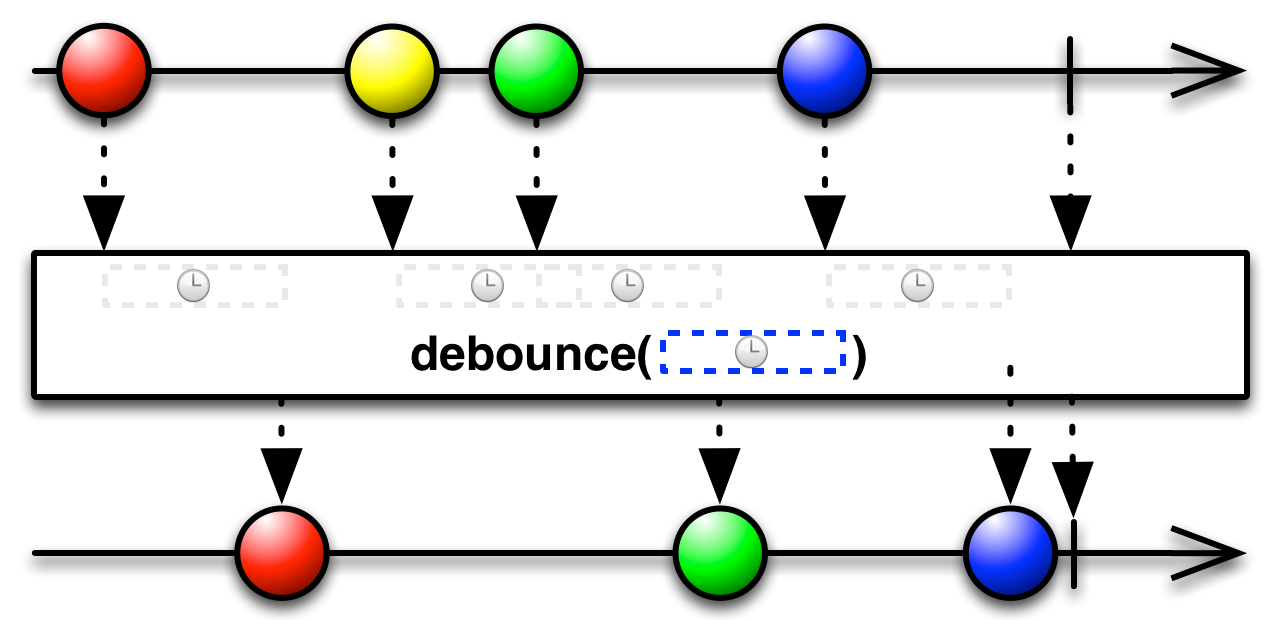
Hi
We has developed a program when the robot lift, there is alert msg sound out based on below sdk override fun onRobotLifted(isLifted: Boolean, reason: String) { }
https://github.com/robotemi/sdk/wiki/Movement#onRobotLiftedListener
It is working when temi lift and alert msg sound out. However, sometimes there is no robot lift and the robot just going to certain location then robot also trigger it is lifted. Any comment
Thanks