 S-Dafarra
commented
6 years ago
S-Dafarra
commented
6 years ago Here there are two separate issues.
- Periodically the simulink execution is stopped for a long time (nearly 50ms every 300ms).
- The real time synchronizer tries to "recover" setting control loops of 1ms or less.
While the latter can be solved my modifying the code (as discussed f2f with @diegoferigo), the cause of the first needs to be investigated.
 diegoferigo
diegoferigo traversaro
traversaro
 FabioBergonti
FabioBergonti So I didn't store any data and I didn't send any signal to the robot
So I didn't store any data and I didn't send any signal to the robot From 8.2 to 10 s
From 8.2 to 10 s




 Looking on the plot I clearly notice that the distance is quite constant, it has a mean of 0.2890 s
This confirm a sort of periodicity
Looking on the plot I clearly notice that the distance is quite constant, it has a mean of 0.2890 s
This confirm a sort of periodicity Starting from that graph I evaluated the distance between the peaks with an amplitude higher than 0.015 s
Starting from that graph I evaluated the distance between the peaks with an amplitude higher than 0.015 s
 DanielePucci
DanielePucci nunoguedelha
nunoguedelha

 After 200s the behavior change
A zoom of that region
After 200s the behavior change
A zoom of that region
 So the problem is reduced only in that part
So the problem is reduced only in that part
 The problem is reduced during all the time instant
The problem is reduced during all the time instant
 gabrielenava
gabrielenava
Description
I've noticed that during my experiments with the real robot in some iterations simulink takes a lot of time. I understood this behaviour comparing the desired simulink time (
tou) with the output of the blockYarp Time. This behaviour has an impact on my results because due to this problem I see spikes in the joints state.I thought that could be a problem of my model (which is a little bit complex), so I've increased the simulink sampling time (from 0.01 s to 0.02 s) in order to give more time for the resolution, but the problem was still present.
Then I've generated a very simple model where I command in velocity only one joint, there were no scope, no get measurement.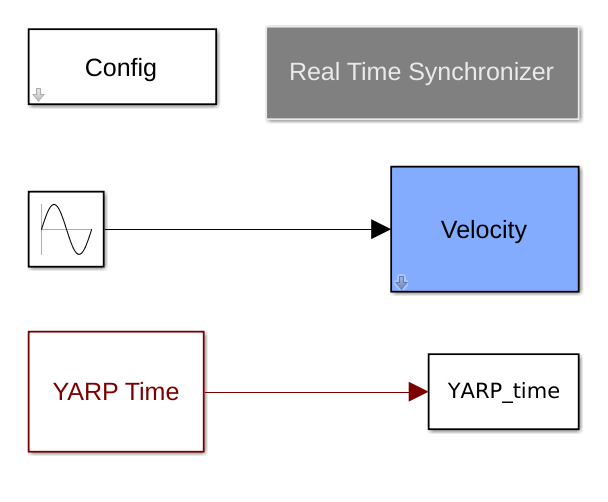 The problem was still present
Here below some graph
The problem was still present
Here below some graph
From the graph I've noticed that in some iteration simulink takes a lot of time, then it tries to recover the delay (where the slope of the blue points is higher). But after some iteration the phenomena reappers
Platform
I've performed my tests on
iCubGenova02Reproducibility
I did a some tests and it happens every time
Additional information
Ubuntu 16.04v4.0]2018aand2016bcc @gabrielenava @S-Dafarra @fiorisi @DanielePucci