 rohanpsingh
commented
1 year ago
rohanpsingh
commented
1 year ago Hi @jaku-jaku I took a brief look at your changes, I think some of the general use functionalities could've be merged here too :)
Nevertheless, since you opened issue https://github.com/rohanpsingh/mujoco-python-viewer/issues/16 I've been working on rendering multiple cameras on the side, besides some other cool features. Hope I can spend more time on this soon.
constant time keyboard callback action through hashing instead of linear time with if-else
Did this give you noticeably better performance?
Thanks.
 jaku-jaku
jaku-jaku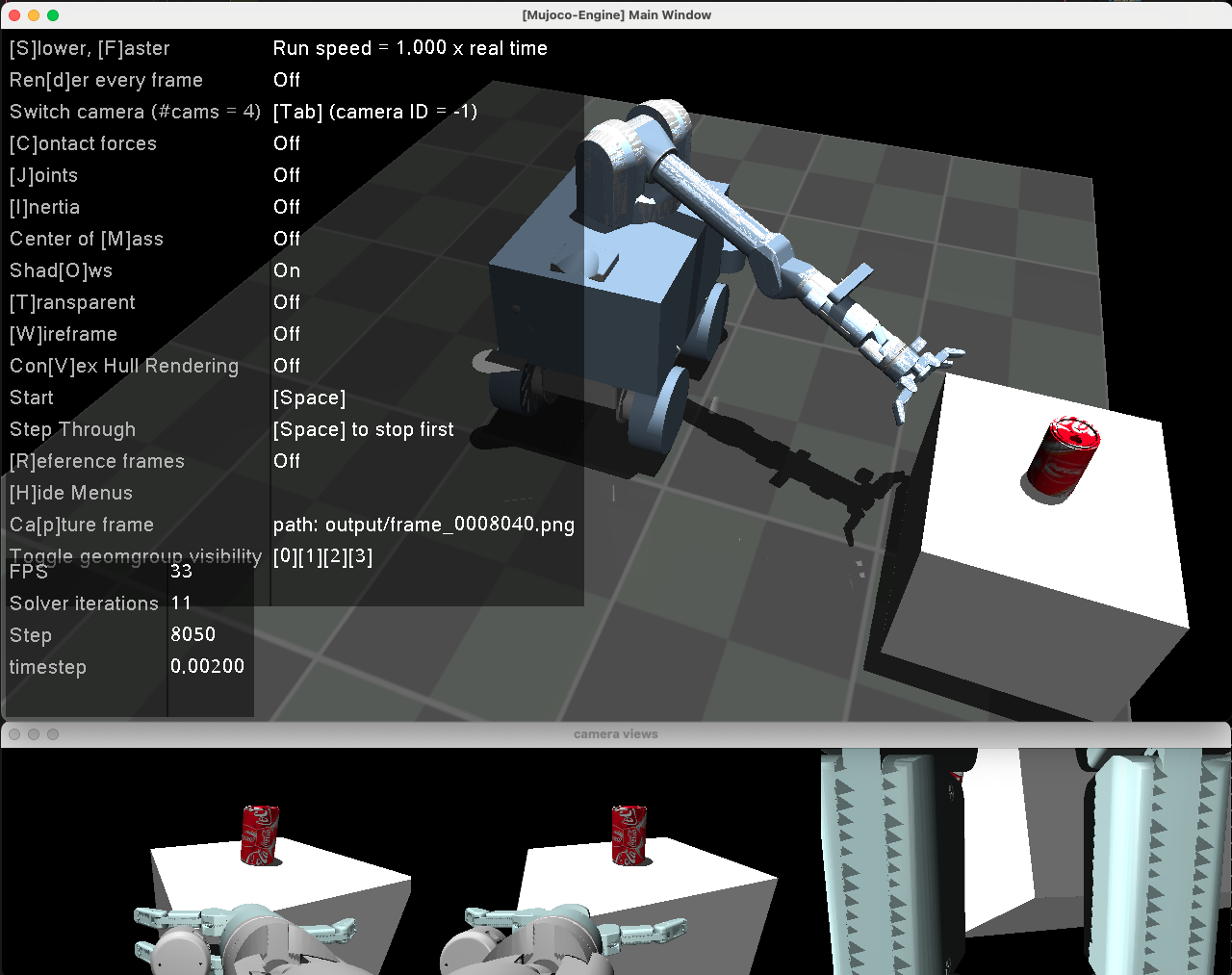
Hi Rohan, Here is my revision of the viewer:
Major refactoring:
Let me know if you have any comments. Thank you for your initial works.
Best Jack