 mnissov
commented
2 years ago
mnissov
commented
2 years ago I think the rotation part is actually correct, in the software manual they define three frames: sensor, lidar, and IMU. I imagine these correspond to the laser_sensor_frame, laser_data_frame, and imu_data_frame respectively.
That being said, there is an error in the translation portion of the transformations as the sensors each carry a certain vertial offset between frames. This is illustrated here


 Gaurav-Kapoor-07
Gaurav-Kapoor-07
 goksanisil23
goksanisil23


 Aposhian
Aposhian ga58lar
ga58lar
Hello I just checked that the frame transformations on the tf_static topic are different from the transformations given in the Ouster Software Manual. This is the output if the /tf_static topic which is published just once when we start this driver -
transforms:
header: stamp: sec: 1632922020 nanosec: 663400150 frame_id: laser_sensor_frame child_frame_id: laser_data_frame transform: translation: x: 0.0 y: 0.0 z: 0.0 rotation: x: 0.0 y: 0.0 z: 1.0 w: 0.0
When I visualized the data in RViz I saw that the laser_sensor frame is rotated by 180 degrees from the RViz axes. The laser_data_frame in RViz with respect to the real Ouster 0S1-128 Sensor was like this -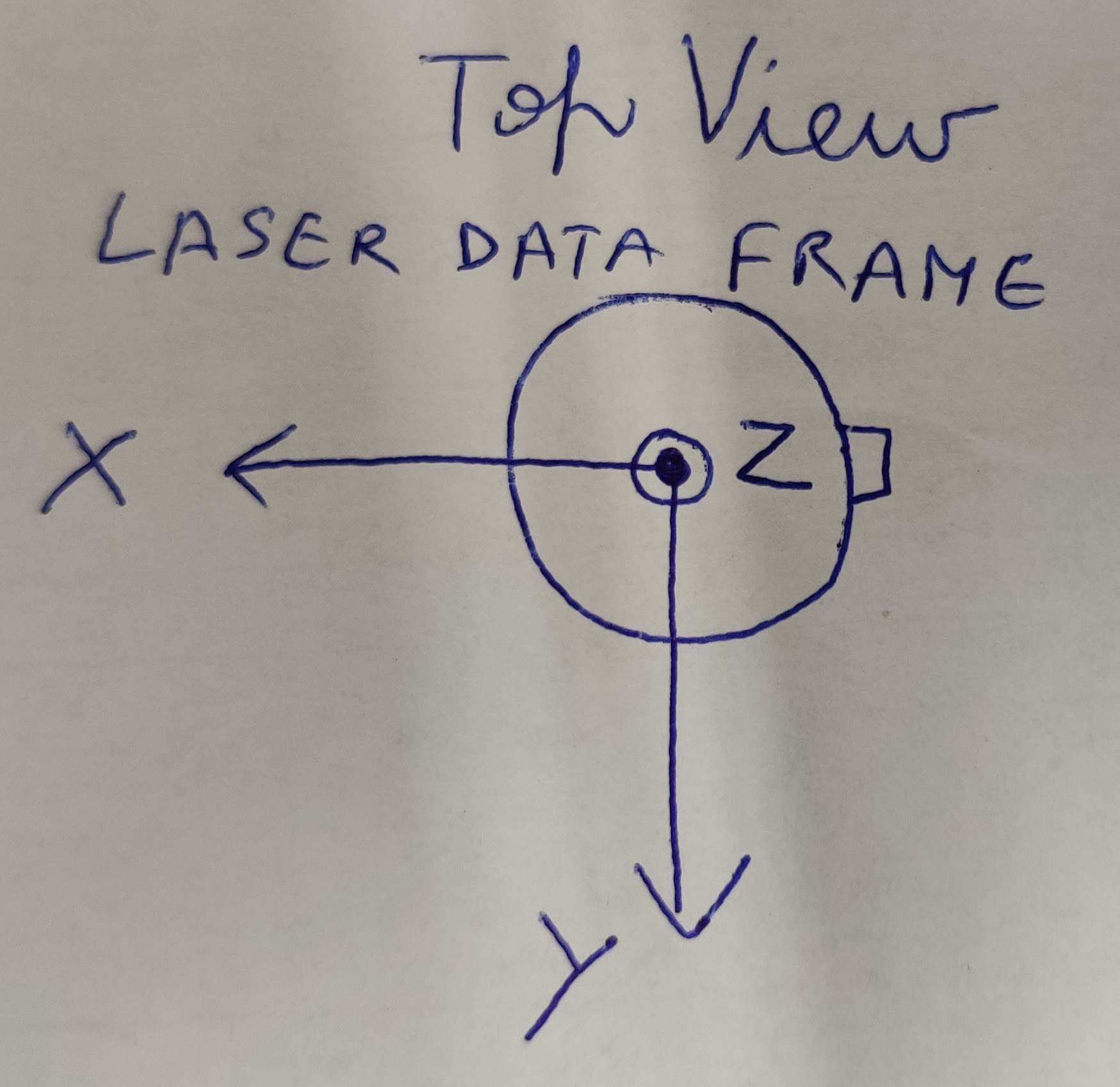 Which is completely different from the frame transformations given in the manual. So I want to know the correct transformations of the laser_data_frame and imu_data_frame with respect to the laser_sensor_frame and also the correct position and orientation of the laser_sensor_frame with respect to the real Ouster Sensor.
Which is completely different from the frame transformations given in the manual. So I want to know the correct transformations of the laser_data_frame and imu_data_frame with respect to the laser_sensor_frame and also the correct position and orientation of the laser_sensor_frame with respect to the real Ouster Sensor.
Thanks.
Best regards Gaurav