 Gaurav-Kapoor-07
commented
3 years ago
Gaurav-Kapoor-07
commented
3 years ago @mnissov What about the translations? Which translations should we use? as given in the software manual or in this driver which are 0, 0, 0 with respect to each other.






 mnissov
mnissov SteveMacenski
SteveMacenski
 So, one would expect to see the cardboard board in the positive x-axis of the
So, one would expect to see the cardboard board in the positive x-axis of the 



This has been discussed slightly in #84 but I figured the discussion has drawn out to the point where it deserves a a dedicated post with demonstration.
The problem is that the
/pointsare not given correctly according to the coordinate frames from the software manual.Bug
Case Setup: There are some objects in the background but, the object of interest will be me standing in front of the lidar on the connector side. According to the documentation this would mean I am standing on the positive x axis in
lidar_frameand negative x axis insensor_frame.We can see the points are posted in
lidar_framebyso the points are expressed in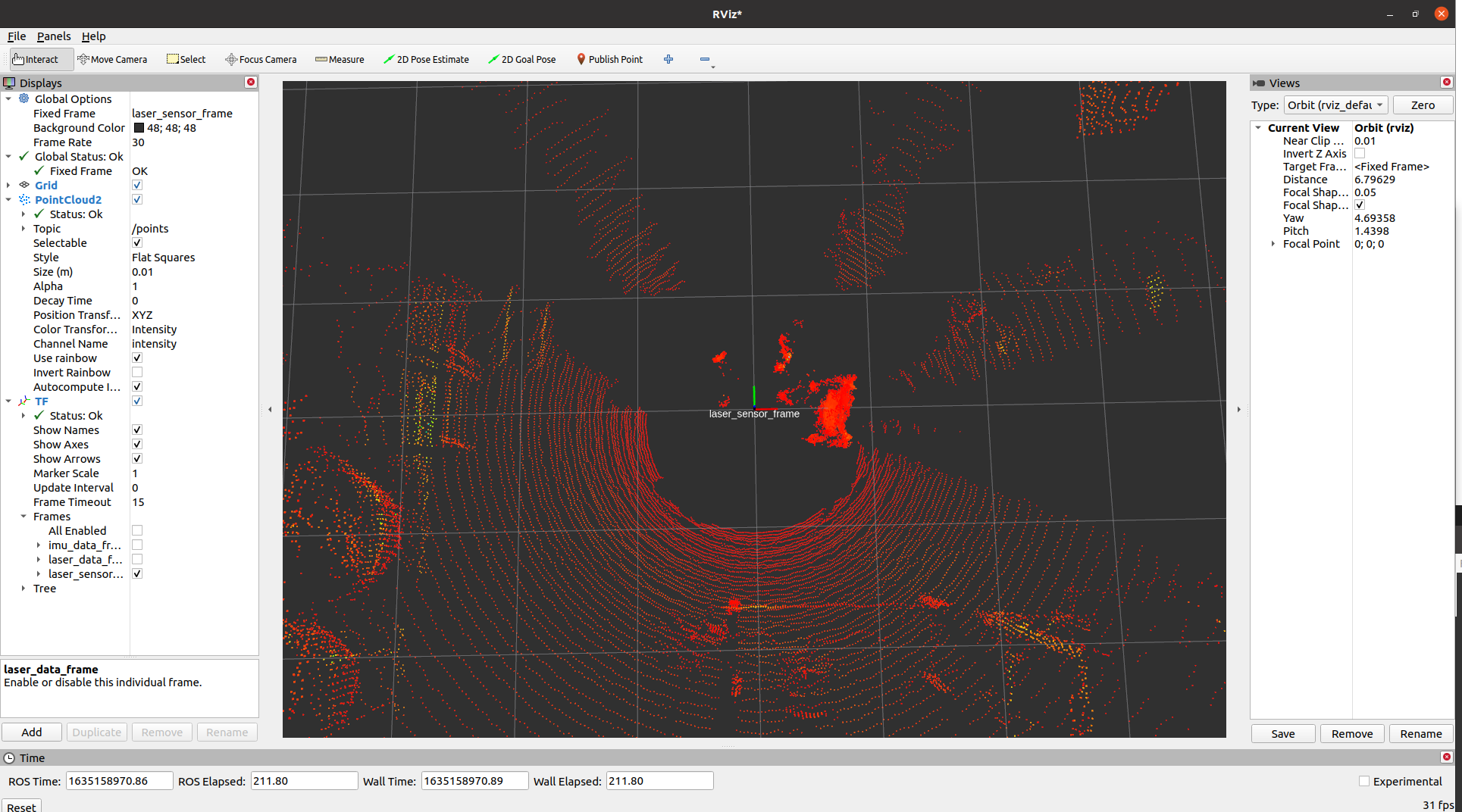
lidar_frame. Then, looking at the visualization in rviz one can see that I am placed oppositely to what one would expect. That is to say, in positive x axis insensor_frameand negative x axis inlidar_framedespite standing in front of the connector.Expectation
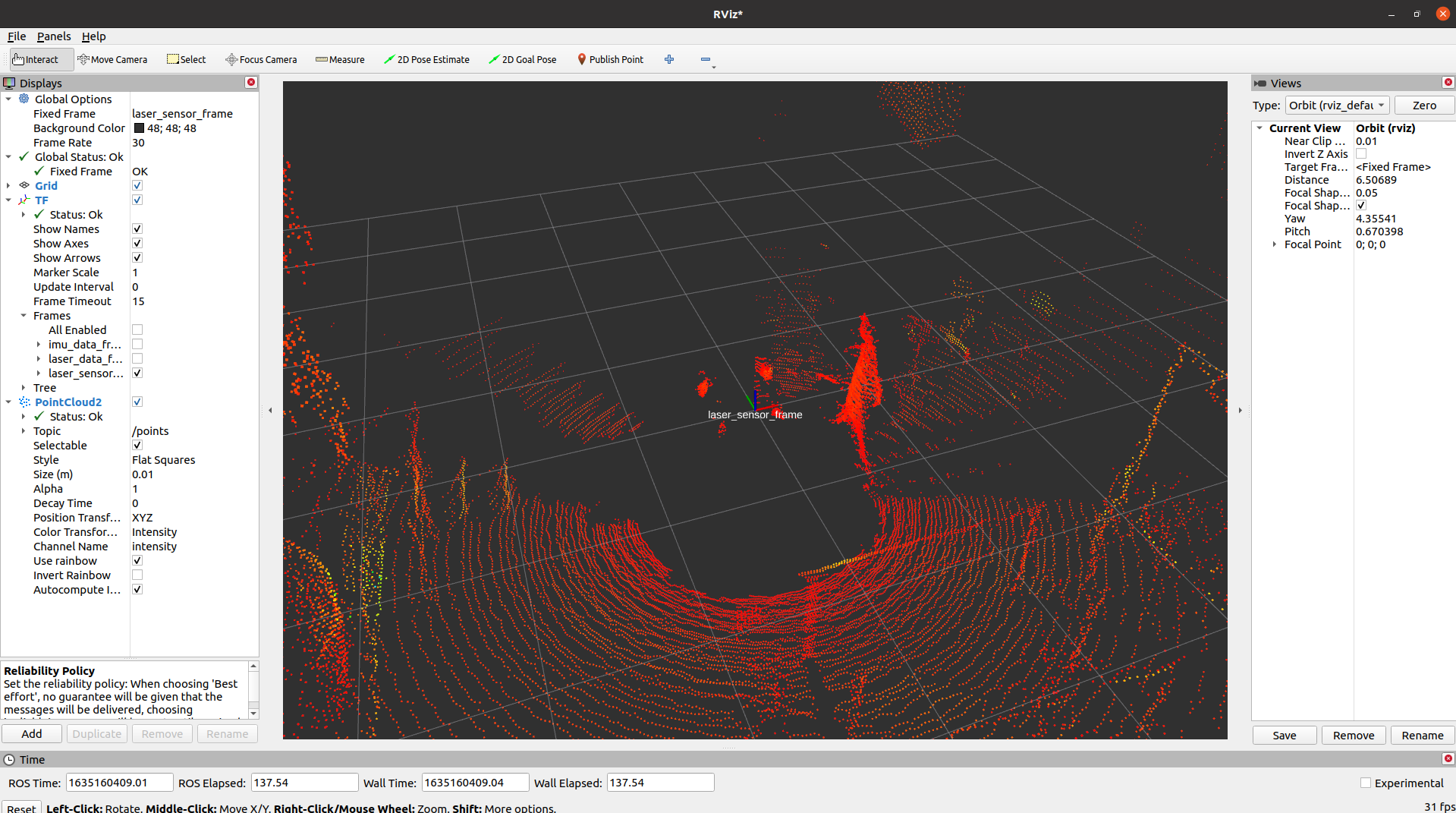
My expectation is that the point cloud would be rotated 180 deg about the z axis, such I am visualized standing along the positive x axis in
lidar_frameand negative x axis insensor_frame.SW
I am running ubuntu 20.04 LTS, with ros galactic and the newest version of
ros2_ouster_driversinstalled bysudo apt install ros-galactic-ros2-ouster. The lidar is OS0-128 running version v2.1.1.