 martimorta-at-work
commented
5 years ago
martimorta-at-work
commented
5 years ago Hi @Drikuy, I used the driver last week and it was working, anyway, have you:
- Selected "Remote Control" in the teaching pendant?
- Selected very low speed and acceleration scale values in MoveIt (I think I am using something around 0.05) Cheers
 Dirodgu
Dirodgu abdelhbibbounou
abdelhbibbounou mlautman
mlautman gavanderhoorn
gavanderhoorn But when I launch the following launch files:
But when I launch the following launch files:
 skywoodsz
skywoodsz angux94
angux94
Hi, I am new in ROS and I am having some troubles to move UR10e robot (real) using ROS. The thing is that I connect with the robot, but when I use MoveIt to load the planned path it just stops. To launch the robot communication and its controller I use the following statements:
Here is the code of the terminal window where I have launched ur10e_bringup.launch file:
In addition, I left here an *.jpg picture of the rqt_graph when the system is working.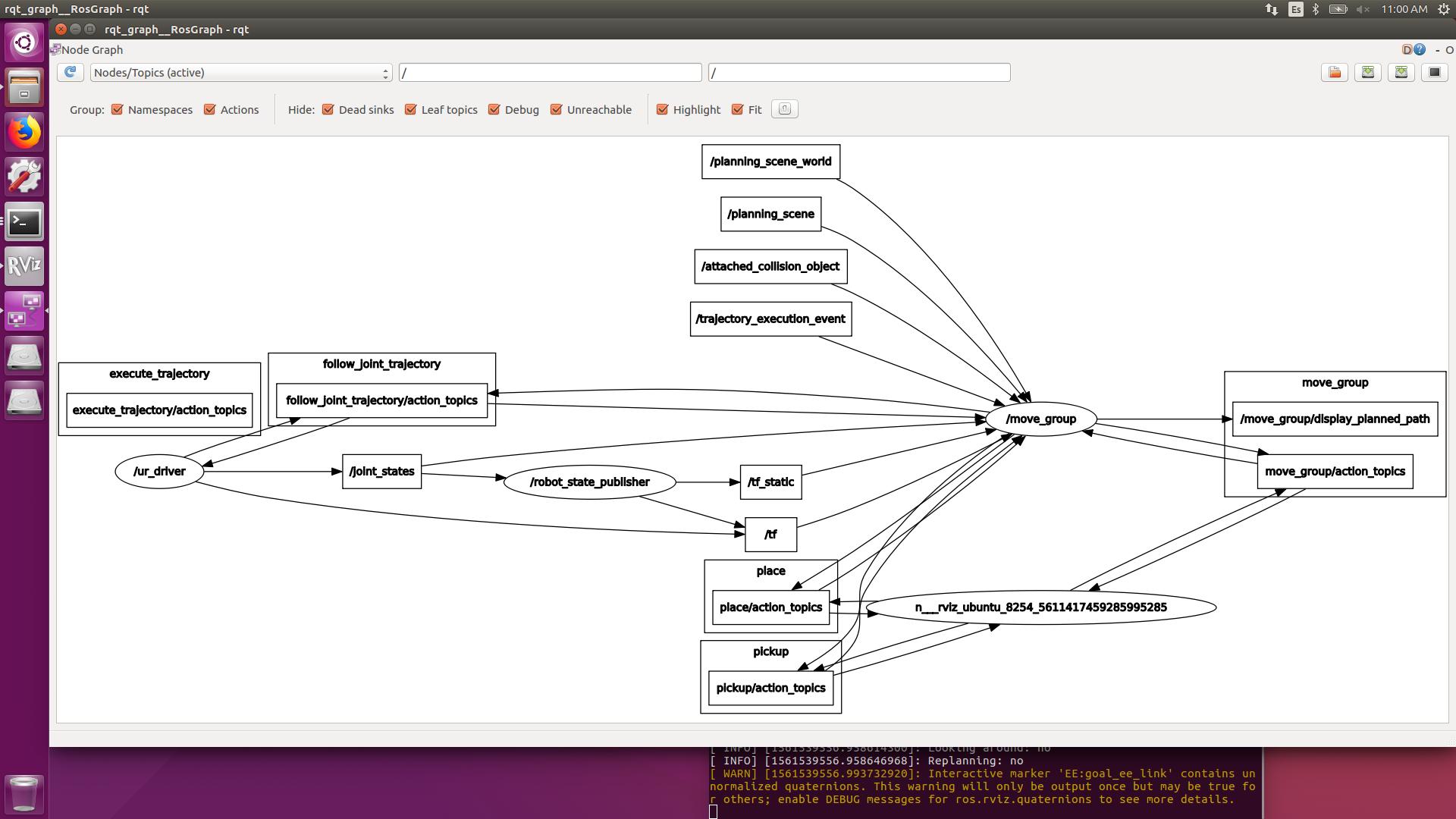
May the problem be that execute_trajectory must be linked with follow_joint_trajectory? If so, I think that the solution is remapping one of this two topics to the other. Does it make any sense? Thank for your help