 LorenzBung
commented
4 years ago
LorenzBung
commented
4 years ago Not sure if it helps, but I had these problems when I started using yak.
- Make sure your camera matrix is correct
- Verify that the published point cloud is in the 1st octant (meaning only positive x-, y- and z coordinates)
 gachiemchiep
gachiemchiep
 schornakj
schornakj


 gavanderhoorn
gavanderhoorn



 ghost
ghost dbdxnuliba
dbdxnuliba
Hello @schornakj We followed your guide at https://github.com/ros-industrial/yak_ros/issues/36#issuecomment-654521420 but we couldn't make yak_ros work yet. Would you mind give us some guidance.
Here're what we already finished:
ROS kinetic, create ROS workspace, compile the yak and yak_ros package. We ran the yak_ros's demo and see the output as follow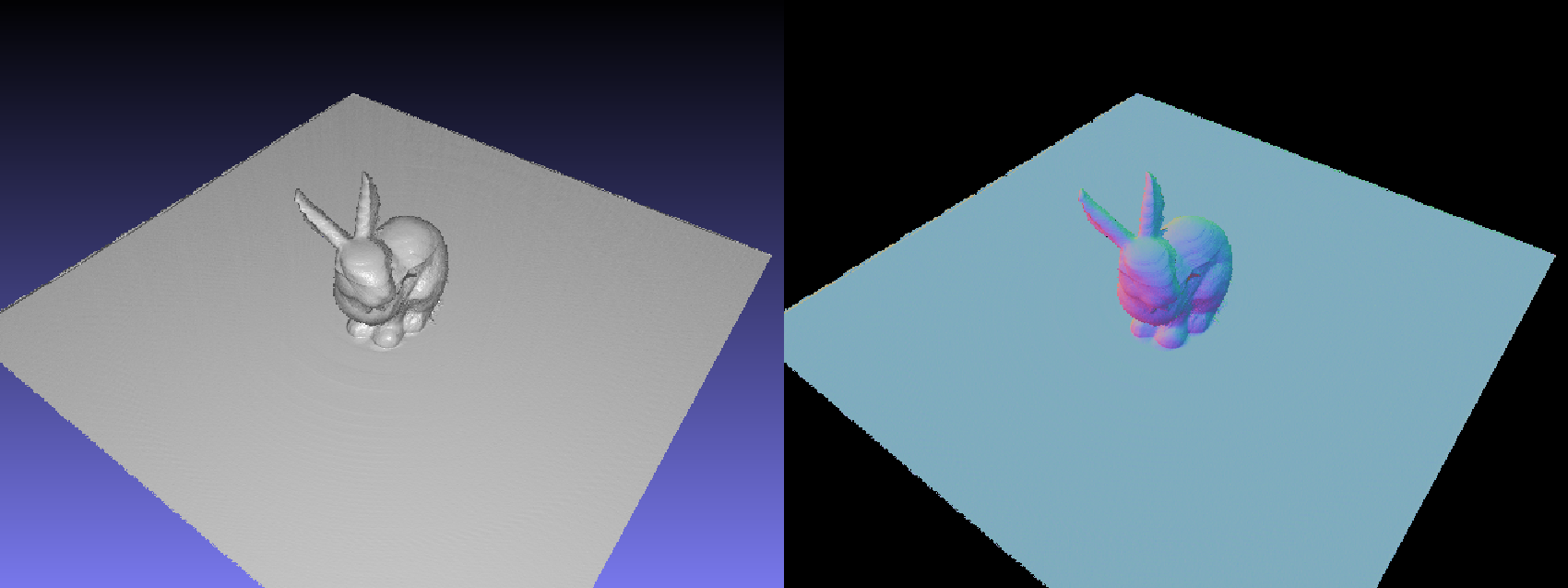
compile the realsense-ros package and use it to publish the pointcloud in structured PointCloud2 format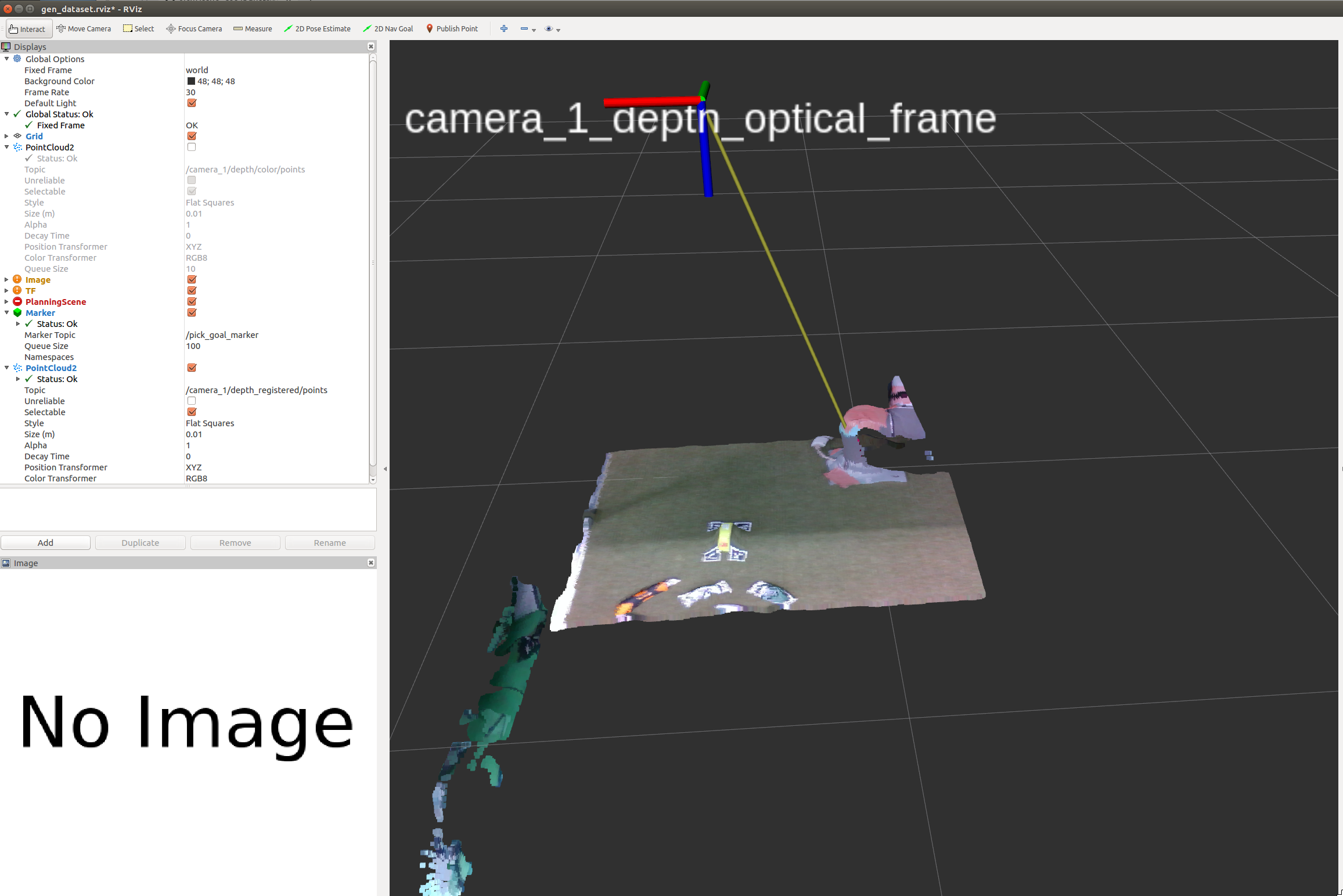
write launch file to start yak_ros_node. Part of the launch file is as:
But the GUI just got stuck and didn't have any output message.
Would you mind take a look and help us. Thank you/