 haisongdong-harrison
commented
6 years ago
haisongdong-harrison
commented
6 years ago Oops, it seems to be a bug in our getAllIK function. Although I still have no idea why this bug can generate a different path every run, after some tiny fix it is working well now. Sorry for the unnecessary issue report.
 gavanderhoorn
gavanderhoorn
I just encountered a very weird problem when using Descartes with MoveIt!. We have a fixed trajectory to plan and we always start from the same pose and of course seed the trajectory with this pose. Every time the planned path can reproduce the trajectory perfectly but it may or may not add some offset to the path on a certain axis (X-axis in our case), completely at random. The screenshot below may give you a better idea:
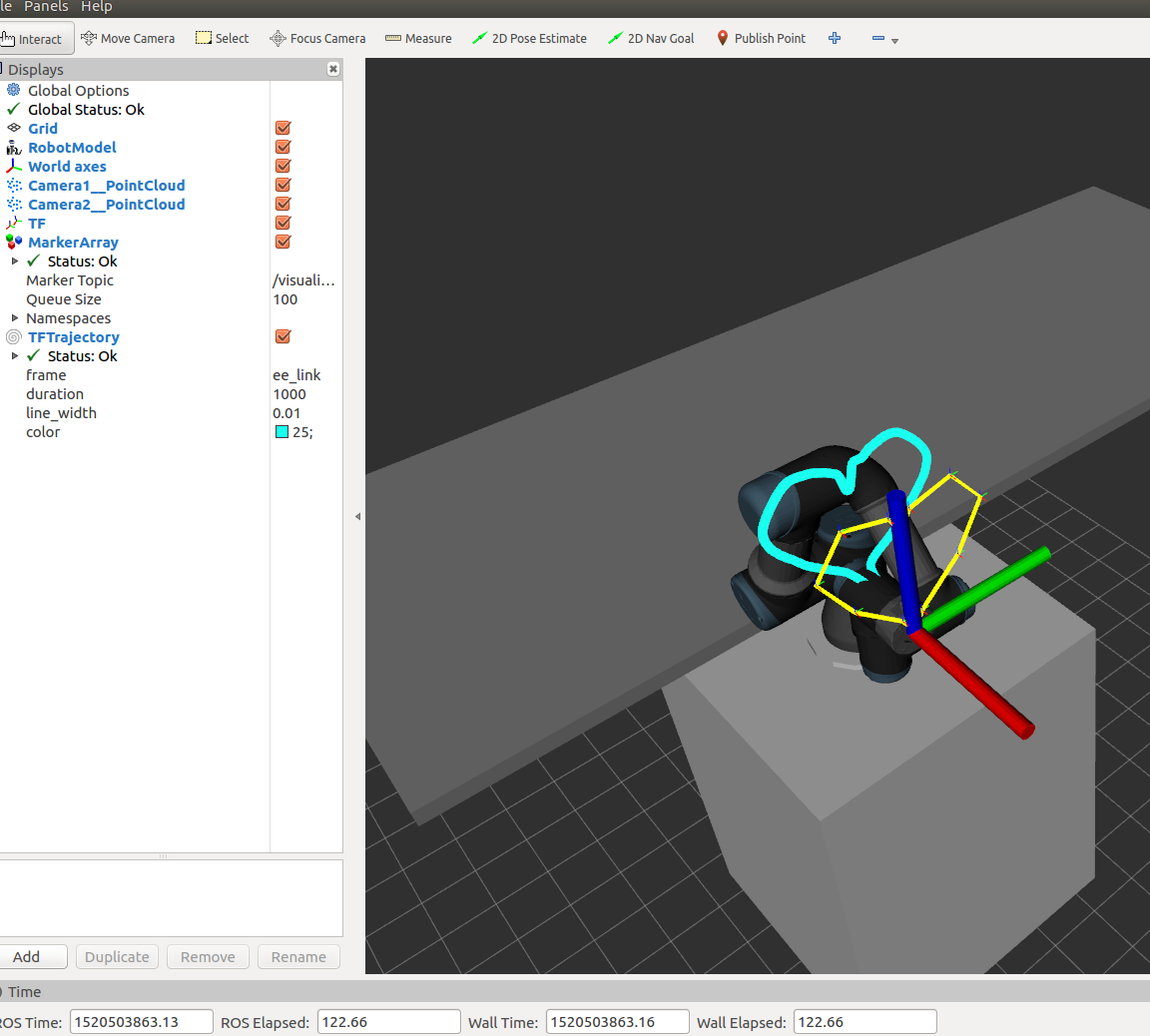
The first photo is when the path follows our desired trajectory while the second one is a path that looks similar but about 10cm back on the X-axis.
Our program is adapted from the tutorial. And we use the specific UR3 kinematics solver from ur_kinematics package. It is understandable that each time the planned path may be slightly different, but I really cannot figure out what could introduce such a great offset to the path randomly when all the conditions/inputs are the same?
Any help would be appreciated!