 gavanderhoorn
commented
5 years ago
gavanderhoorn
commented
5 years ago First: please do not post screenshots of terminal text.
It's just text, so copy-paste it into the issue. Use proper formatting for it then (three backticks before and after).
Two things to check:
- why is
joint_trajectory_actionshutting down? Without that, nothing will move. - which MoveIt launch file are you starting? If it's
demo.launch, nothing will move.
Finally:
I am following the tutorials
That's great, but I hope you agree that without you telling us which tutorials you are following exactly, this statement is not going to help us help you.
I am using using Ubuntu 16.04, Kinetic distro, ROS ABB experimental and ABB Kinetic-devel repos.
I am trying to get the robot to do a simple Cartesian trajectory. It is working on RViz simulation but the controller is not receiving the trajectory. Therefore the robot is not executing it. It works when I send individual points but not a trajectory.
You can find my node generating the Cartesian path here.
For your reference I have attached a screen shot of the terminal of what the RViz is reporting when I ROS launch my node.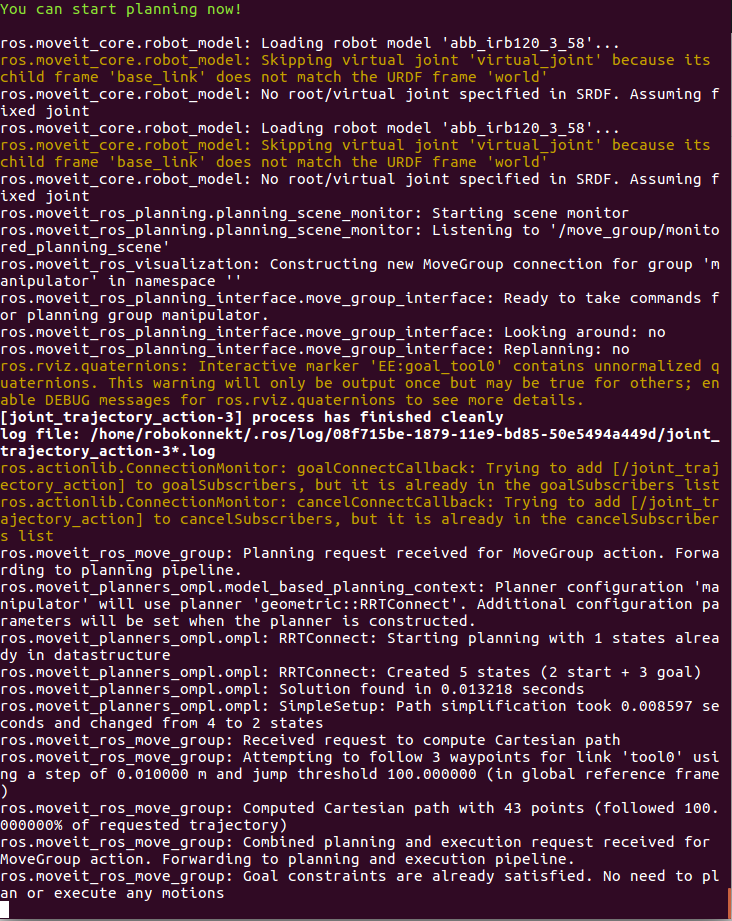
I am not sure what is going on, I am following the tutorials, new to ROS. Any guidance would be much appreciated.
tbs845