 gavanderhoorn
commented
4 years ago
gavanderhoorn
commented
4 years ago Could you please provide a little more detail?
Did you close this issue because you resolved your issue, or was this just to let us know what you feel should be done?
Closed sch923 closed 4 years ago
gavanderhoorn
commented
4 years ago Could you please provide a little more detail?
Did you close this issue because you resolved your issue, or was this just to let us know what you feel should be done?
 sch923
commented
4 years ago
sch923
commented
4 years ago Thank you for reply. I'm always helped by your good comments everywhere, gavanderhoorn.(respect very much!!)
When I posted this , I wondered which repository I should submit ros-industrial/motoman or moveit. This problem is about setting to controll GP7 with yrc1000u, ros-industrial and moveit setup assistant.
Did you resolved your issue?
Yes. I resolved this issue by using soooo much time...
was this just to let us know?
Yes. I wanted you and users know about this problem. Not moveit users but ros-industrial users especially GP7. but I did not know this is issue or not. And problem was resolved by ourselves. (not perfect) So I closed this issue for just telling information.
I have much information to controll GP7. Because I struggled for a month to connect real robot, ros-i driver and moveit controller. I wanted the tutorial for ros-industrial users not only simulated robot in rviz but real industrial robot .....
gavanderhoorn
commented
4 years ago I resolved this issue by using soooo much time...
It would have been OK to ask questions earlier. That could have saved you quite some time it appears.
I wanted you and users know about this problem. Not moveit users but ros-industrial users especially GP7. but I did not know this is issue or not.
I'm somewhat confused: is the issue you solved with the GP7 specifically, or with setting up the driver with YRCu controllers?
I have much information to controll GP7. Because I struggled for a month to connect real robot, ros-i driver and moveit controller.
If you have specific points that would need clarifying, perhaps we can work to address those.
I wanted the tutorial for ros-industrial users not only simulated robot in rviz but real industrial robot
There are a few tutorials but those definitely could use some attention.
sch923
commented
4 years ago It would have been OK to ask questions earlier. That could have saved you quite some time it appears.
I will do so next time. Thank you.
is the issue you solved with the GP7 specifically, or with setting up the driver with YRCu controllers?
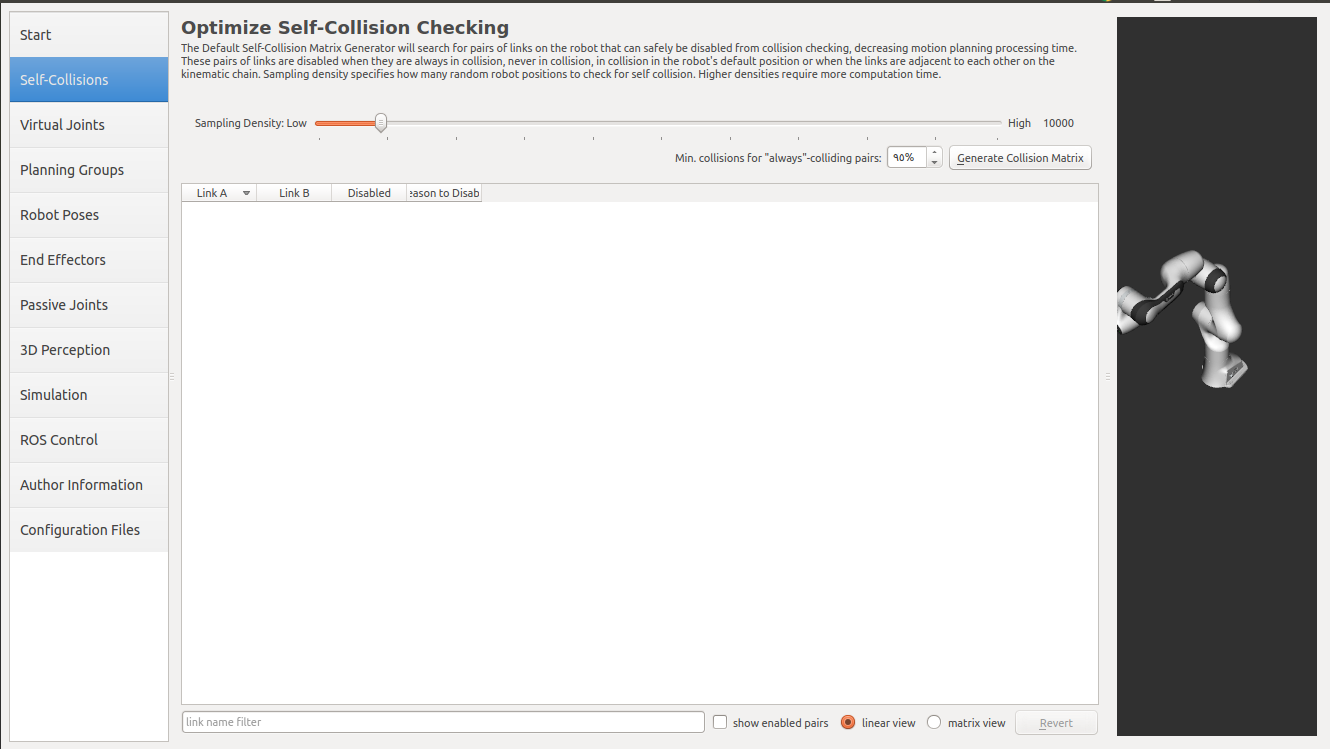
I have found with the GP7 only. This is not a problem with YRCu controllers. This problem is in this step. http://docs.ros.org/melodic/api/moveit_tutorials/html/doc/setup_assistant/setup_assistant_tutorial.html#step-2-generate-self-collision-matrix
gavanderhoorn
commented
4 years ago But what is the problem exactly?
sch923
commented
4 years ago what is the problem exactly?
Compatibility between Optimized Self-Collision Checking and GP7 collision model.
If you don't set the collision disable between link_2_l and link_4_r in setup_assistant.launch,
When I clicked "Generate Collision Matrix", there was no settings between link_2_l and link_4_r in the initial state with GP7 collision model. (I tried sampling density both lowest and highest.)
there is large space robot can't approach.
After all settings, when I moved GP7 to some x,y,z coordinates with this command, there were some points that robot didn't go because of that auto collision generator settings, though GP7 could move to those coordinates with Yasukawa remote pendant.
 cjue
commented
2 years ago
cjue
commented
2 years ago The OPs issue was caused by the same problem mentioned here for the GP4: https://github.com/ros-industrial/motoman/pull/433#issuecomment-988610550
The collision mesh for link2 is too large / fills in the concave geometry and restricts the range of movement for joint3 significantly. Should I check for other GP models for the same issue and create an issue just for this issue mentioning all affected robots?
{kind=link}
I had a problem when I managed to controll GP7 with moveit. If you don't set the collision disable between link_2_l and link_4_r in setup_assistant.launch, there is large space robot can't approach.