gavanderhoorn
commented
2 years ago
gavanderhoorn
commented
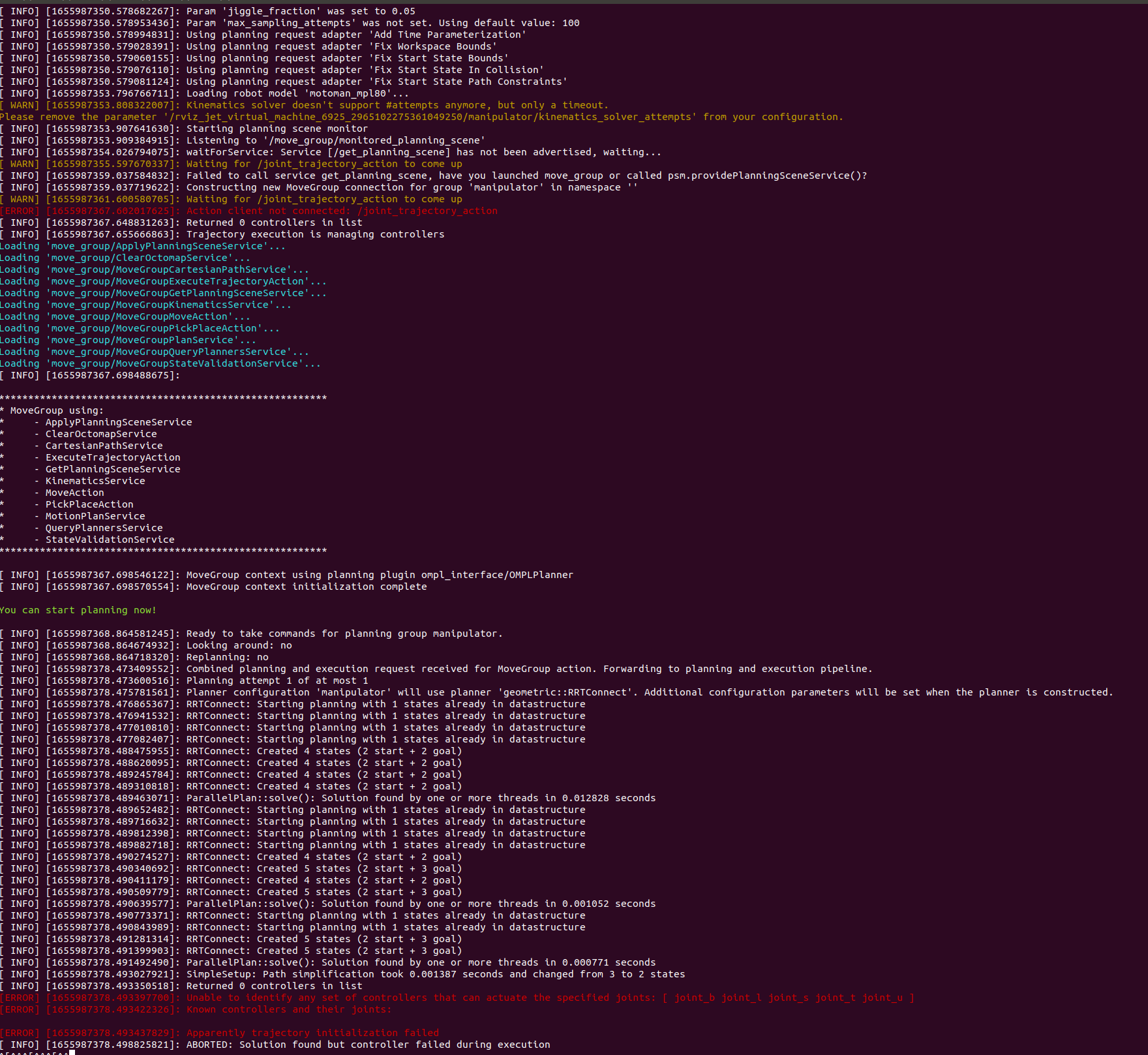
2 years ago Please do not post screenshots of terminals. It's not necessary (it's all text) and they're difficult to read.
Please replace your screenshots by a copy-paste of the terminal text, and make sure to format is using fenced code blocks.
 qcz01
qcz01
18.04,melodic 1,change demo.launch