 gavanderhoorn
commented
4 years ago
gavanderhoorn
commented
4 years ago The error message:
[ WARN] [1606142029.588070245]: Unable to find user-specified joint names in 'controller_joint_names'
[ WARN] [1606142029.588861400]: Unable to find URDF joint names in 'robot_description'
[ERROR] [1606142029.588939423]: Cannot find user-specified joint names. Tried ROS parameter 'controller_joint_names' and the URDF in 'robot_description'.gives us an indication of what is going "wrong": the driver needs to know how to map incoming joint state messages (from the robot), which are essentially just arrays with anonymous doubles, to ROS joint names, as JointState messages work with names, not anonymous arrays of doubles).
Without supplying it with some information, the driver doesn't have that map, and cannot correctly perform the mapping.
That's what it's telling you: it either gets that information by reading the controller_joint_names ROS parameter, or by looking at your URDF (in the robot_description parameter) and then assuming the order in which your joints are specified in the URDF is the order in which the information from the robot comes in (ie: in those arrays of anonymous double).
If you start the driver in isolation, you won't have that parameter set, nor have loaded a URDF, hence: error.
You'll need to load a URDF before starting the driver, or set the controller_joint_names parameter.
I'd actually recommend the latter, as it will make your configuration more robust: it won't depend on how the URDF happens to be structured.
We don't have any examples of this here, or in ros-industrial/staubli or ros-industrial/staubli_experimental, but take a look at fanuc_m10ia_support/launch/robot_interface_streaming_m10ia.launch. That would be essentially the structure you could use (of course you'd include the staubli_val3_driver robot_interface_streaming.launch file, not the fanuc one).
This is my first post, so i am sure i am missing some information.
I am trying to connect to a real staubli rx160 robot, but cannot get the communication working.
What i have done so far: I have build the staubli rx160 package I have build the staubli_val3_driver package and followed instructions
I can launch the moveit config with a fake staubli robot and move to random coordinate (plan and excecute).
I have configured the TCP ports as follows: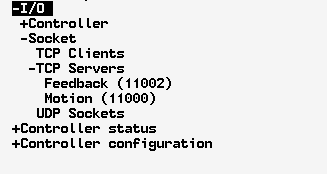
I can run the program on the staubli robot and it says the following (image is emulator, but i get the same image on the real robot):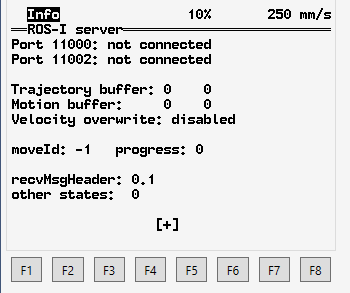
I have configured the ip_address of the robot and laptop in the same range. I can ping the robot. Laptop ip: 192.168.1.200 Robot ip: 192.168.1.5
When i launch the following:
roslaunch staubli_val3_driver robot_interface_streaming.launch robot_ip:='192.168.1.5'i get the following error:
Hope my information is sufficient! Thanks in advance
Theo