 SteveMacenski
commented
4 years ago
SteveMacenski
commented
4 years ago Is this the same rviz window or a new one on a new navigation launch? Can you verify that if you toggle the rviz display types for the costmap (or relaunch rviz) that it appears? I think what you're seeing has nothing to do with navigation but rather a failure in the visualization tools.
Even 0s would show up here with a boundary because of the changes in transparency between the 2 costmap settings. I think you would see 0s on the costmap in your pictures if the costmap were actually being shown.
Not sure it relates, but Buster is also not a Tier 1 supported OS so it may be that the DDS vendors / RMW layers don't do detection properly on that or something. Not sure its related, but could certainly be.
I was 4/4 in launching them just now - so might want to take a second look and make sure what's happening is what you think is happening.
 naiveHobo
naiveHobo
 dkuenster
dkuenster MiguelCompany
MiguelCompany daisukes
daisukes jacobperron
jacobperron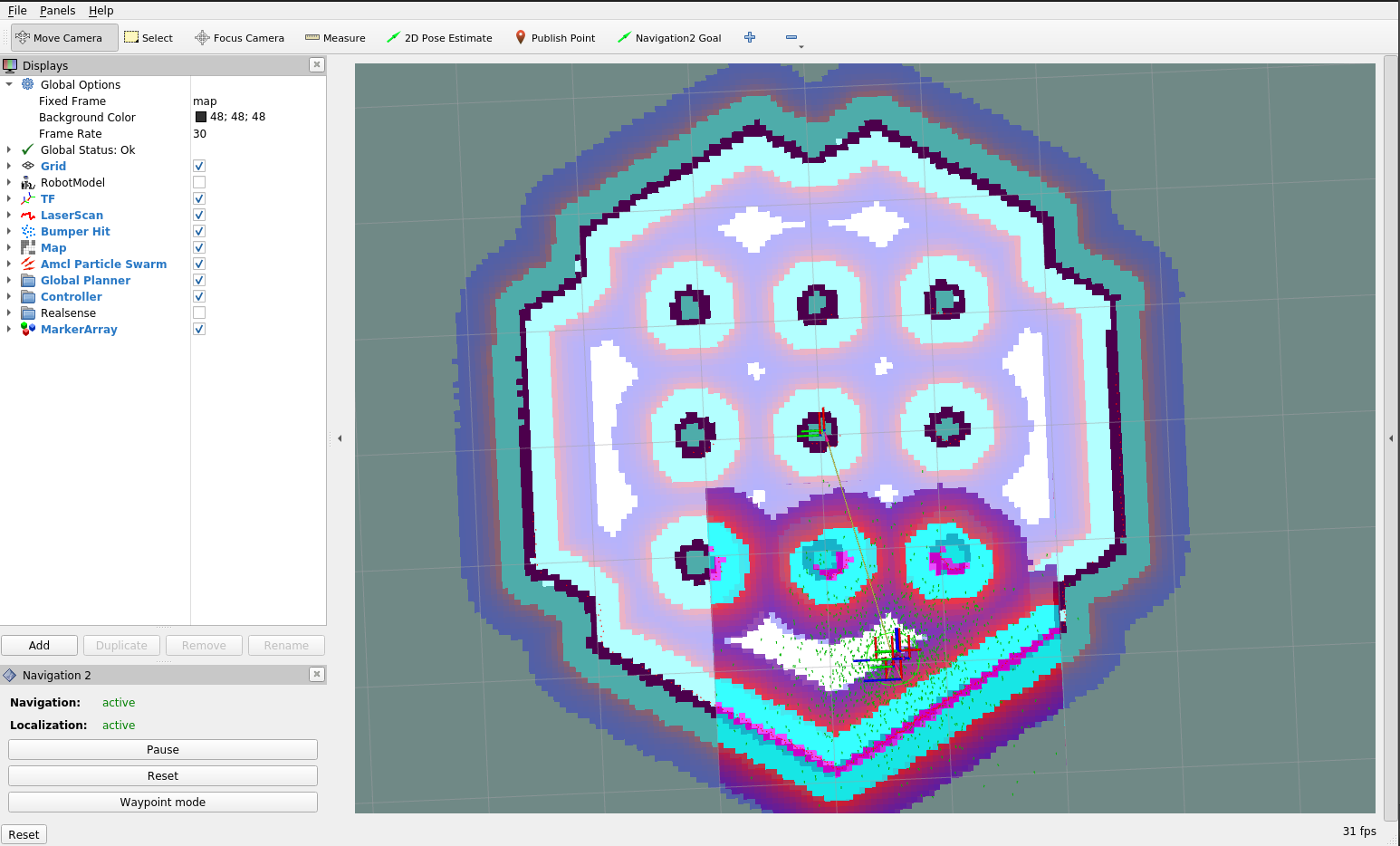{kind=link}
Bug report
Required Info:
Steps to reproduce issue
use tb3_simulation_launch.py to start the gazebo simulation and nav2 stack. Then use "2D Pose Estimate to localize the robot".
Expected behavior
Local Costmap should show every time, e.g:
Actual behavior
In more than 50% of all initializations the Local Costmap doesn't show, eg: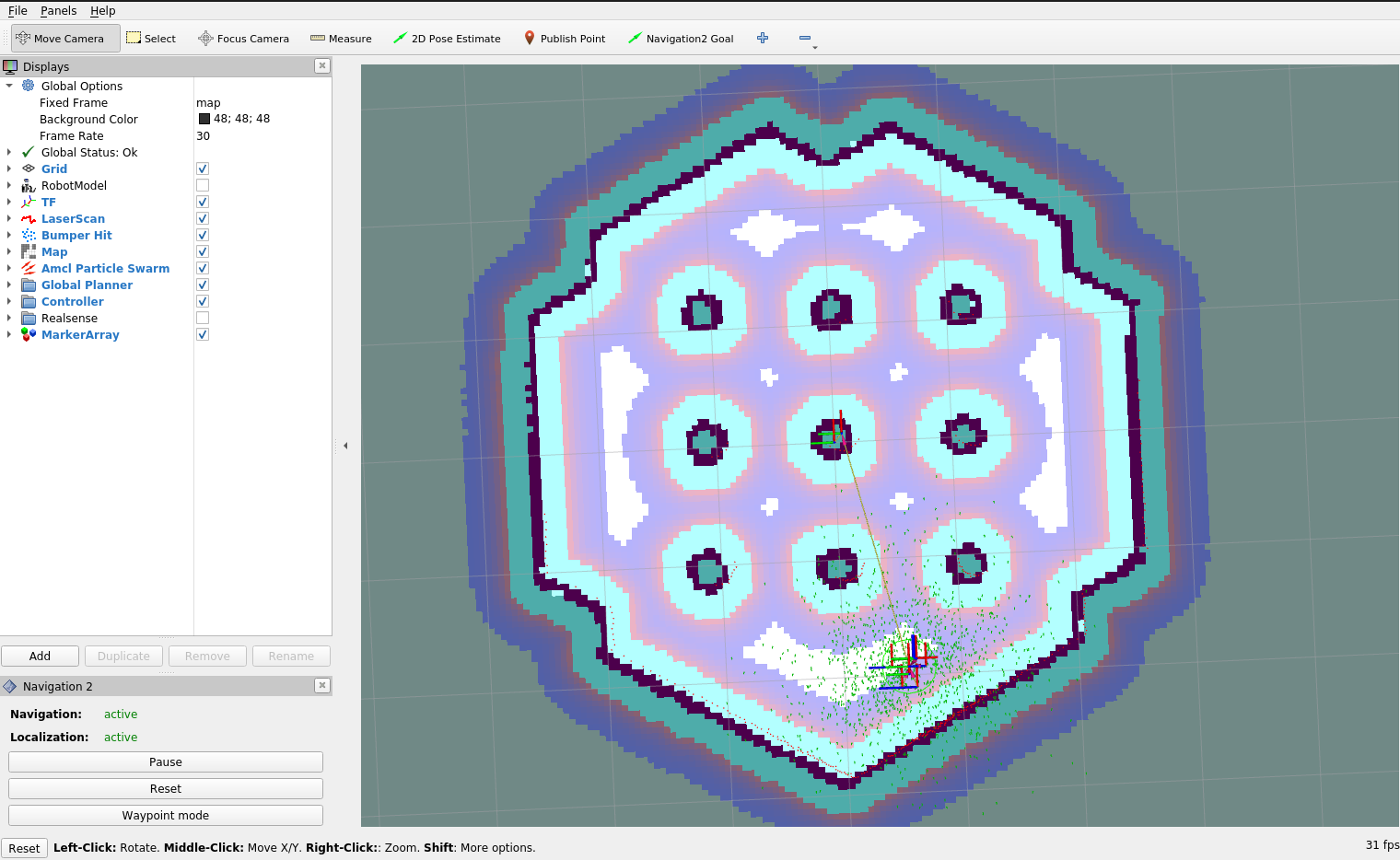
Echoing /local_costmap/costmap shows the costmap constains all zeroes despite being in the same position as in the working case, where it contains actual values. Rviz doesn't report any issues with the topics.
Additional information
console_output_empty_costmap.txt console_output_working_costmap.txt
I can't find any differences or errors in the console output. Can anyone reproduce the issue or has any idea what is happening?