 SteveMacenski
commented
4 years ago
SteveMacenski
commented
4 years ago The problem appears when apply some layer which is going after inflation_layer.
I'm a little confused on that one. I thought we made it so that the costmap filters can't impact the update window size? And this only happens when you have something after the inflation layer, no other time?
inflation layer in updateCosts() routine employs points out of costmap window
I think that's good behavior for the same reasons the comment points out.
it resets only bounds window between each iteration set by updateBounds() leaving untouched out-bounds-window.
I don't understand this comment, where is there a reset happening?
What's your suggested action to fix this? Move the min/max i/j to the other function? @mikeferguson maybe you can look at those Nav1 PRs and let us know if that was just an oversight reverting them.
 AlexeyMerzlyakov
AlexeyMerzlyakov

 As shown on picture above, the upper part of keepout zone is already went to
As shown on picture above, the upper part of keepout zone is already went to  The analysis shown that the "ghost" problem has another than "out of bounds artifacts" root cause. The "ghosts" appears because of insufficient boundary window cleaning while "out of bounds artifacts" artifacts related to the case when some plugin going after inflation layer.
Testing confirms that: the reverting a part of original patch will cause "ghost" problem to return back again.
So, the patch for the current issue won't have a previous code reverting parts.
The analysis shown that the "ghost" problem has another than "out of bounds artifacts" root cause. The "ghosts" appears because of insufficient boundary window cleaning while "out of bounds artifacts" artifacts related to the case when some plugin going after inflation layer.
Testing confirms that: the reverting a part of original patch will cause "ghost" problem to return back again.
So, the patch for the current issue won't have a previous code reverting parts. The main idea here is that
The main idea here is that  DLu
DLu
The problem appears when apply some layer which is going after
inflation_layer. In my example, it iskeepout_filterlayer from this tutorial applied afterinflation_layerin a global costmap as follows:The costmap artifacts look like follows: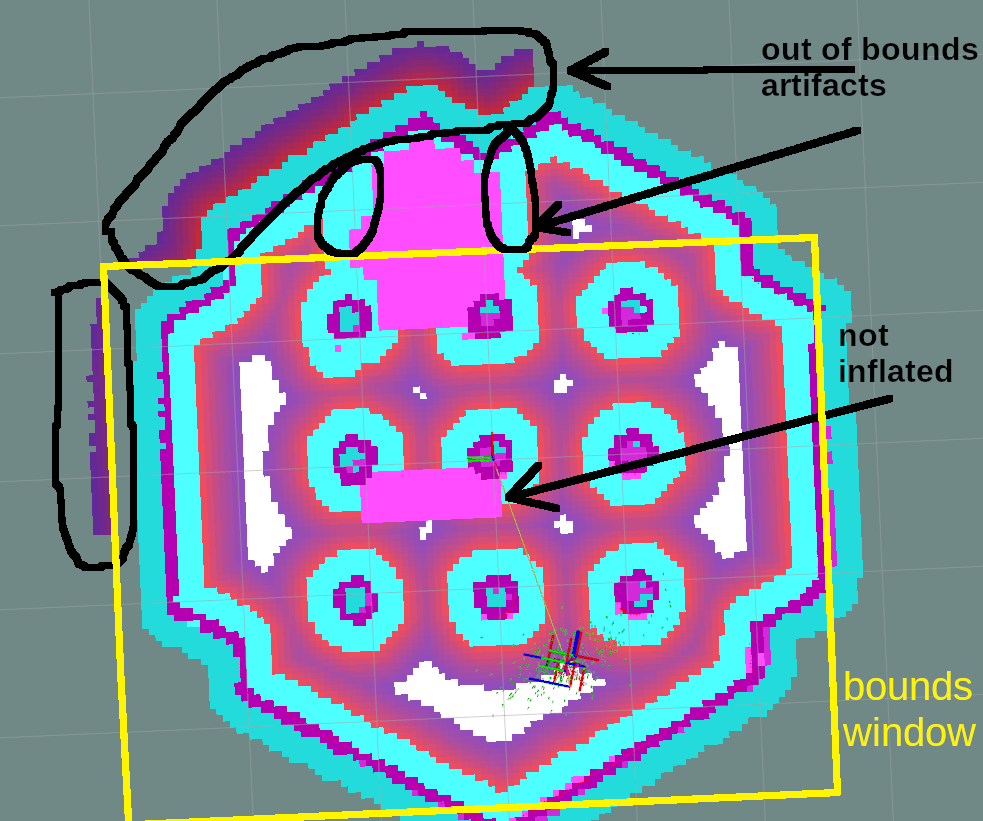
This will look even worse when using two near keepout zones e.g. in a following warehouse example: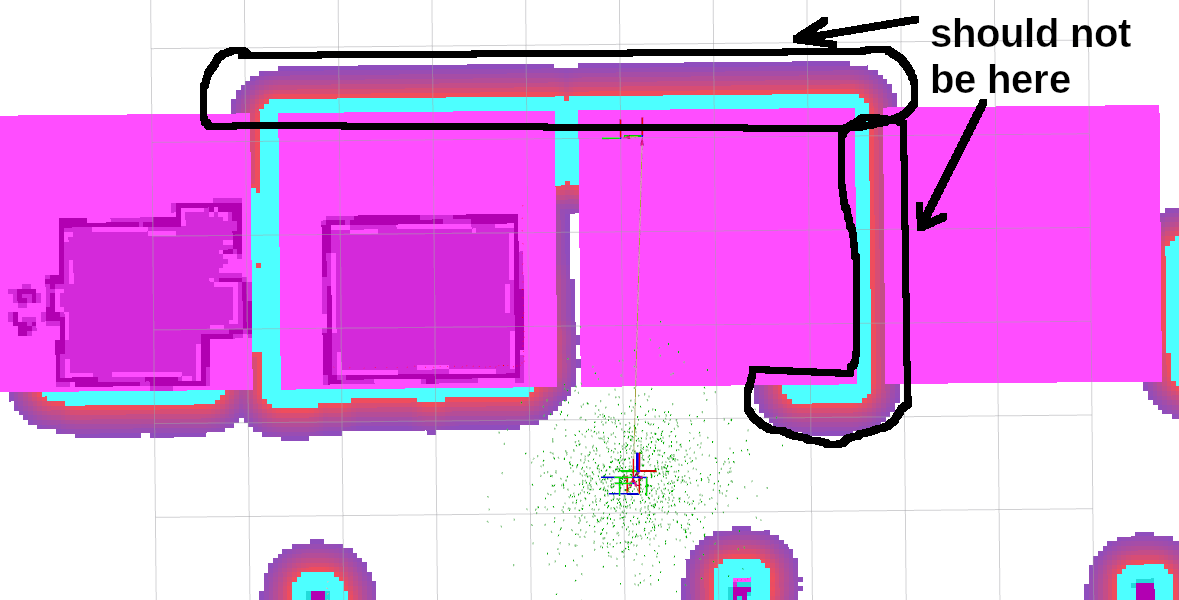
In last case robot can not plan between two keepouts because of these artifacts.
The problem appears because of inflation layer in
updateCosts()routine employs points out of costmap window (set inupdateBounds()) in the following part of code:Since
LayeredCostmapdoes not know anything about it, it resets only bounds window between each iteration set byupdateBounds()leaving untouched out-bounds-window. And, inflation layer re-inflates unnecessary points remaining from previous iteration which causes the artifacts from above.I've started to check the history of the above part of code and found that corresponding borders change was made in: https://github.com/ros-planning/navigation/commit/7ef4d926d97e001e5697e4de9c64433c3c5684b6 In this commit bounds expansion was removed from
updateBounds()and added toupdateCosts(). However, it was moved back later in: https://github.com/ros-planning/navigation/commit/9ee8580ce7f473f46456d8e9604aa7fde24116a8 and https://github.com/ros-planning/navigation/commit/e731bbf647cfaf68a4a4b8df664fc391d444ab62 Which looks strange because of the window shifting code inupdateBounds()(where it actually should be) initially was removed, then was restored back, but another window shifting inupdateCosts()is still in master. Since, window shift inupdateBounds()restored back, it looks like the above part of code inupdateCosts()is unnecessary. Moreover, I think by overall costmaps concept,updateCosts()should operate only inside bounds window without getting out.Removing this part of code from
updateCosts()seems to resolve the problem for me. Any ideas or suggestion, could we remove it in master?Required Info: