 mikeferguson
commented
5 years ago
mikeferguson
commented
5 years ago In addition to my individual comments on code above, I want to further talk about the states Accepted/Executing. To me, it seems that we need both?
Let's assume I'm porting something that was previously implemented with a SimpleActionServer:
- I presume that I would set a thread pool of 1 to process the execute() callback. This will make sure we only process one goal at a time.
- I presume there are some other thread(s) involved that call handle_goal(). Thus, multiple goals may be "accepted", each is added to some internal queue.
- The single thread calls execute() with each of my accepted goals. Just before the execute() is called, the caller marks the goal as having state "Executing". The execute() callback then eventually returns a result at which point the goal is either Succeeded, Cancelled, or Aborted.
Thus anytime I have more goals than execute threads, I need both "Executing" and "Accepted" as valid states, so that someone can determine which goals are actually being executed, versus which are queued up.
Is that logic correct? Or am I missing something?
I'd suggest we might want to add some additional information on the assumed threading model in this document, since that was a common headache with ROS1 actionlib.
 jacobperron
jacobperron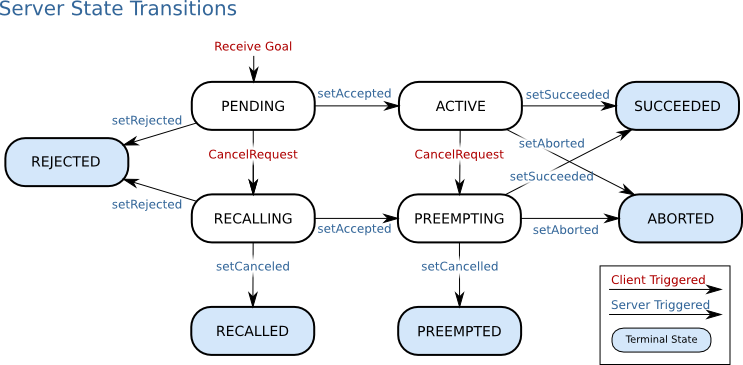
 paulbovbel
paulbovbel wjwwood
wjwwood sloretz
sloretz ruffsl
ruffsl gbiggs
gbiggs
This PR is contains proposed changes and additions to the actions design doc started by @gbiggs in PR #183. It is targeted at
gh-pagesinstead ofgbiggs:gh-pagesso the PR appears on this repo and the waffle board.