 marioney
commented
4 years ago
marioney
commented
4 years ago I think it's a problem of the navigation stack configuration, it seems that the local planner isn't capable of going around the obstacle. So I'm transferring this to the metacontrol_nav repository
I'll take a look at the move_base configuration there
I have run the simple MVP (87a87ea) and the adaptation works, but after adaptation the robot does not succeed reaching the goal pose using the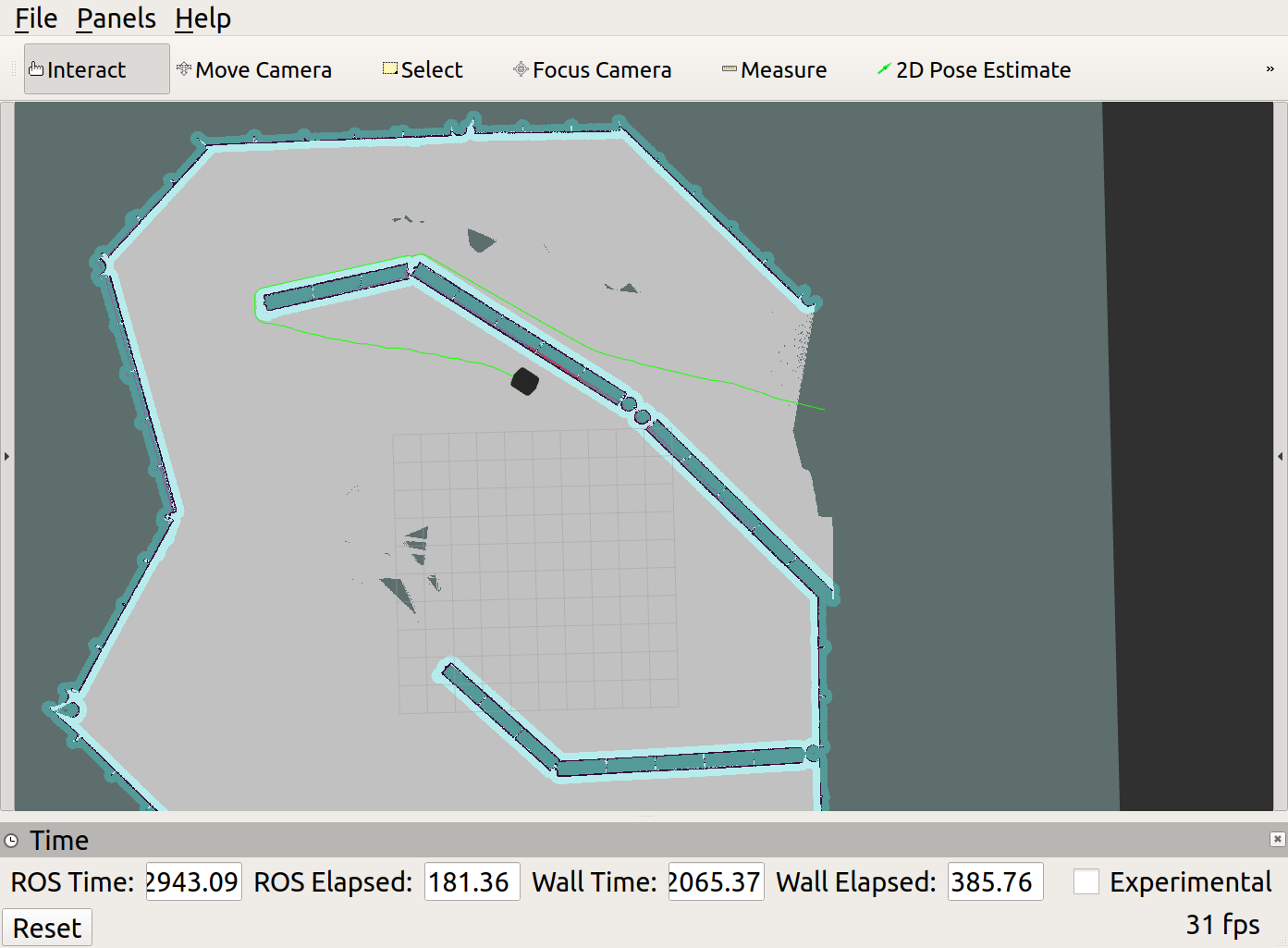
safeconfiguration. See rviz screenshot where the robot gets stuck.