 Vincentqyw
commented
5 years ago
Vincentqyw
commented
5 years ago @Limzui Thanks for your share, I am also curious about the low correctness. BTW do you have any results after fixing these bugs, e.g. some comparison on keypoint repeatability and desc evaluation on hpatches.
 rpautrat
rpautrat Limzui
Limzui


 Detector Illumination:
Detector Illumination:

 Descriptor Illumination:
Descriptor Illumination:

 zpfriedel
zpfriedel

Hi, firstly I would like to thank you for your extensive work on this repository.
I was training and evaluating my own Superpoint using this repo as a baseline and I noticed that descriptor evaluation scores on HPatches viewpoint changes are extremely low. This is even true for your own tests as well (0.244 as per your readme). I myself was getting homography correctness scores within the range of 0.02 to 0.2 for a distance threshold of 3. There is also a currently open issue on this as well: https://github.com/rpautrat/SuperPoint/issues/80. I went ahead to dig a little deeper as to why this might be happening, when I realized a few bugs in your framework.
These problems are specific to evaluating detectors and descriptors on HPatches dataset. For all illustrations in this issue report, I will be using HPatches v_artisans/1.ppm as image 1 and v_artisans/5.ppm as image 2. All paths mentioned will be relative to SuperPoint/superpoint directory.
The first problem that I found was that your adapted ground truth homography is incorrect, which I have root-caused as "Ignored crop". In your _adapt_homography_to_preprocessing() function in datasets/patches_dataset.py, you performed an upscale -> apply homography -> downscale to the ground truth homography to take into account the resized images, however, you did not take into account the central cropping of images after the aspect ratio-preserving resize. The result of that is that when you apply the adapted homography to the resized (and cropped) image 1s, you are actually warping the left-most portion of the images instead of warping the central crop. Here are the in-depth visualizations that I have performed:
Original image1, image2, and ground truth homography: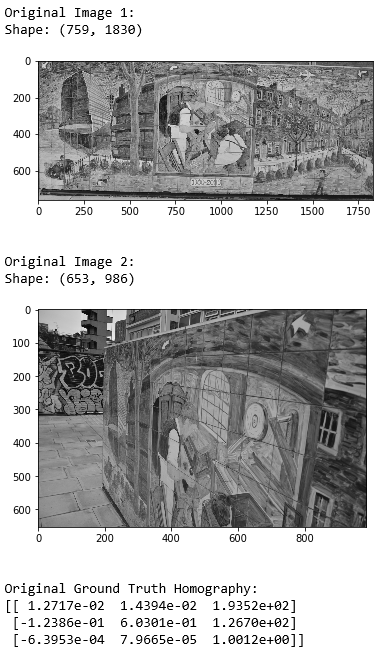
Pre-processing of image1: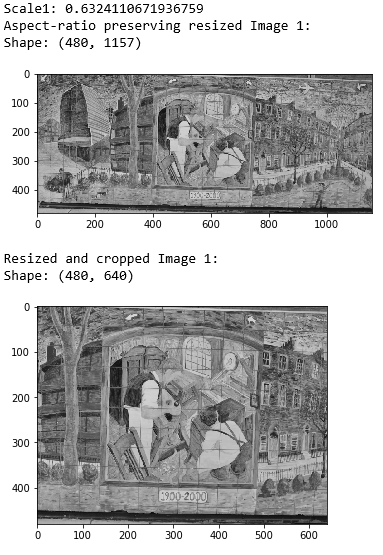
Pre-processing of image2: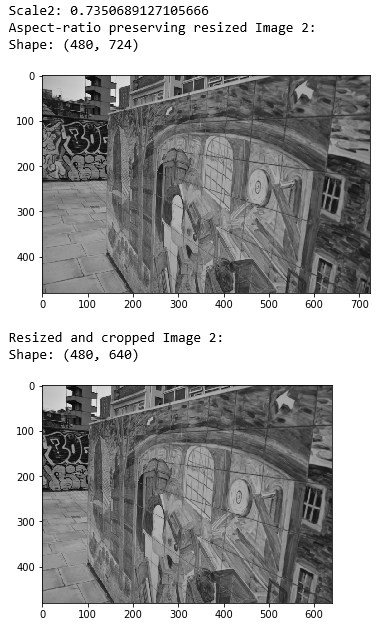
Adapted homography applied on pre-processed image1: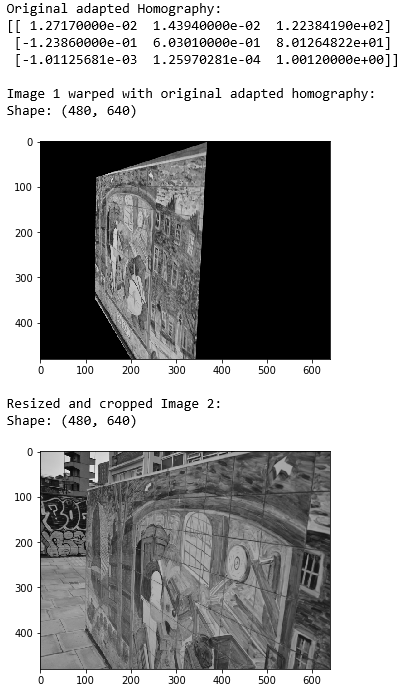
Adapted homography applied on pre-processed image1 (taking left crop instead of central crop):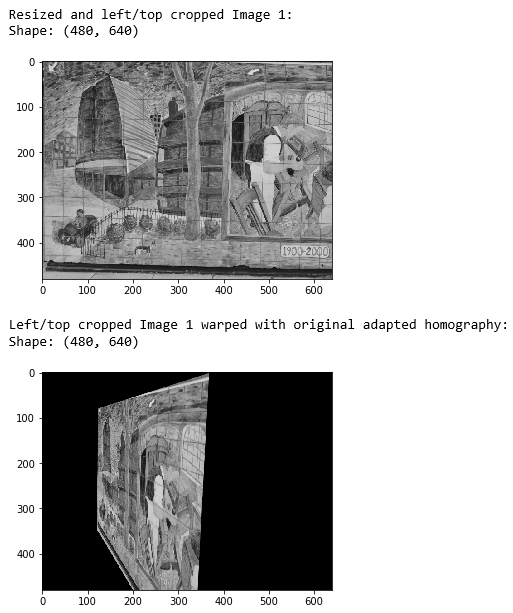
This bug will snowball when performing evaluations using evaluations/detector_evaluation.py or evaluations/descriptor_evaluation.py through ../notebooks/descriptors_evaluation_on_hpatches.ipynb or ../notebooks/detector_repeatability_hpatches.ipynb. The function keep_shared_points() will incorrectly filter out points that are actually shared, while keeping points that are not shared, like the example below: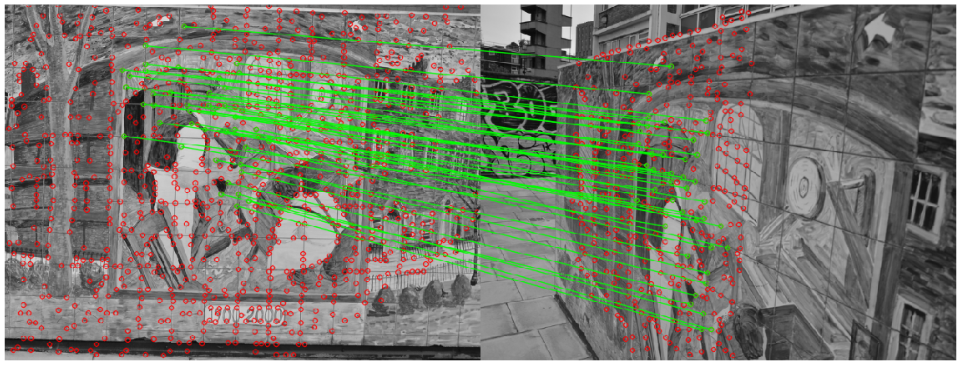
Also, when calculating pairwise distances when evaluating detector repeatability or descriptor homography estimation, keypoints/corners being warped by the adapted homography do not end up where they are supposed to end up, hence introducing extremely large distance errors even for highly accurate predicted homographies:
 The image on the left is the ground truth image 2, and the image on the right is image 1 warped with the predicted homography from cv2.findHomography(). Just by eyeballing these 2, I expect the distance error of the 4 corners to be in the ballpark of <20 pixels. However, when I print out the actual distance error, I get 278 pixels, which is impossible. Furthermore, if you inspect the corner coordinates, the predicted corners make even more sense than the ground truth corners (There should be at least 1 negative number as the top right corner extends above the top of the frame).
The image on the left is the ground truth image 2, and the image on the right is image 1 warped with the predicted homography from cv2.findHomography(). Just by eyeballing these 2, I expect the distance error of the 4 corners to be in the ballpark of <20 pixels. However, when I print out the actual distance error, I get 278 pixels, which is impossible. Furthermore, if you inspect the corner coordinates, the predicted corners make even more sense than the ground truth corners (There should be at least 1 negative number as the top right corner extends above the top of the frame).
I have fixed this bug by adding in a translation element into the _adapt_homography_to_preprocessing() function. Code is as below:
Result: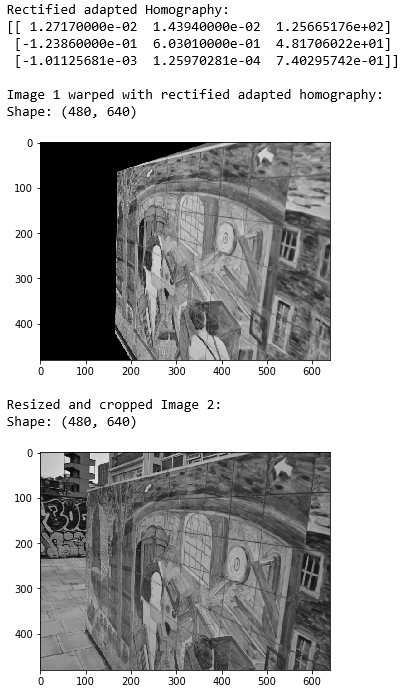
After fixing this bug, I noticed that warping image1 is still not lining up with image2 perfectly:
This is due to a second bug, which I have root-caused as "Scale mismatch". If you refer to the images above showing the pre-processing of image1 and image2, you will notice that they have different scales. This is due to the scale being calculated individually on images, and also because images from the same set (e.g. v_artisans) do not all share the same source resolution. Thus, an image (and therefore, coordinates) resized by a scale factor of ~0.63 cannot be directly compared to another which is resized by a different scale factor of ~0.73.
In order to fix this, I had to edit the _get_data() function from datasets/patches_dataset.py to make sure the warped images are scaled by the same factor that the unwarped image was scaled by. For brevity, I have only included relevant sub-function definitions:
I understand that this will cause image2 to not fit the target_size, but that is of absolutely no importance. Once image2 has been appropriately scaled, the 2 will superimpose perfectly: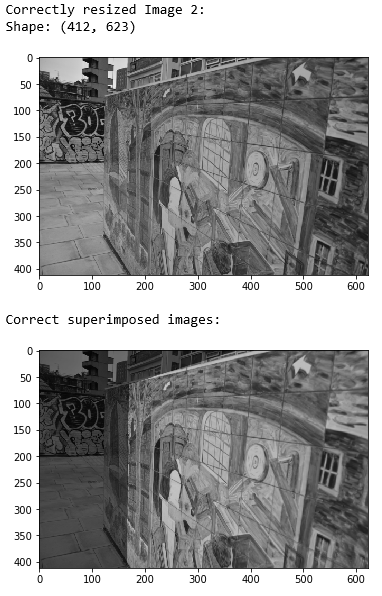
After applying these 2 fixes to the code, I was still getting large distance errors for descriptor evaluation. As I am very sure that the homography is completely fixed now, I managed to narrow the problem down to the corner distance calculation in compute_homography() function in evaluations/descriptor_evaluation.py.
Original code snippet:
What's wrong with this is that the corners are defined wrongly. Homogeneous coordinates format should be (x, y, 1), however the corners are defined as (y, x, 1). This will cause the matrix multiplication with the homography to warp the coordinates as if it's a vertical image rather than a horizontal image (or vice versa). This is the visualization of the real_warped_corners using this code: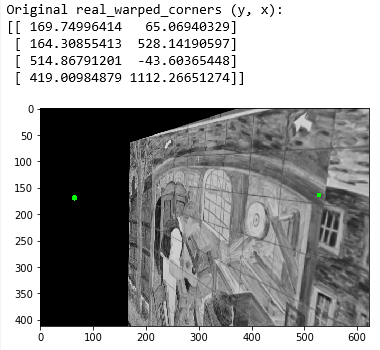
Just by swapping the axes in the definition of corners as so:
And visualizing the new real_warped_corners again, I get this: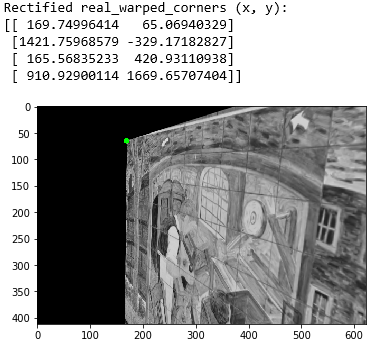
Only after fixing these 3 bugs do I start to get more sensible evaluation results. Thank you for your time in reading this lengthy issue report and once again, thank you for the work you have done on this repository. Feel free to contact me should you have any queries on anything that I have brought up. I will also provide a notebook that includes how I got all the visualization screenshots I have attached in this issue report so that anyone can reproduce them: https://github.com/Limzui/Superpoint-bug-notebook