 goldbattle
commented
3 years ago
goldbattle
commented
3 years ago It is tough to pick a threshold for the zero velocity update. If you are using SLAM features (it looks like you are), you can likely get away with not using the zero velocity update at all. The update will work better with a higher quality IMU, so I am not sure if the d435i will give reasonable results or not (have never used myself).
I assume the issue is that when you place the unit down it is flying away? Are you getting any SLAM feature updates during this time?
 nuyhead-hwang
nuyhead-hwang


 Majed-Alsubaie
Majed-Alsubaie ClementLASSENA
ClementLASSENA mzahana
mzahana lesliennz
lesliennz
Hello.
First of all, Thank you for your great working .
We experimented Open VINS on a Jetson TX2 using the Intel Realsense D-435i.
We are testing Open VINS for the Drone's Position Flight.
By the way, when we tested Open VINS last year (in commit f56cac358509226074f5fbe0d956001464006d34), the pose tracking is working well.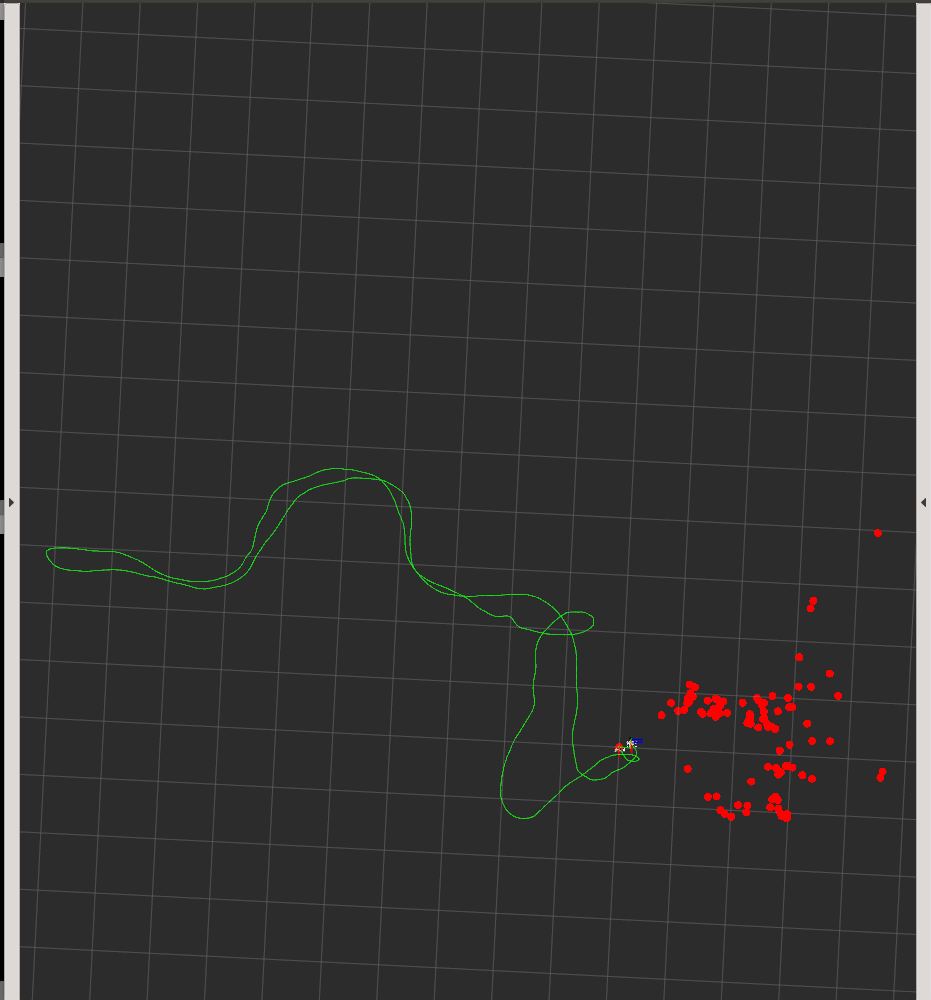
But when we tested Open VINS in recent commit (in commit e516f7c564c2159b7edfb42a8230b732bf6aebc2), pose tracking is more drift aware (especially when device is frozen).
like below image In Current Depth image, reprojected points are diverged.
What is the main difference between two version?
And when we turned on the 'zupt' mode in launch script. the 'zupt' module is working not perfectly. How to adjust the parameters to work fine ?
Thanks.
Regards.