rsasaki0109
commented
1 week ago
rsasaki0109
commented
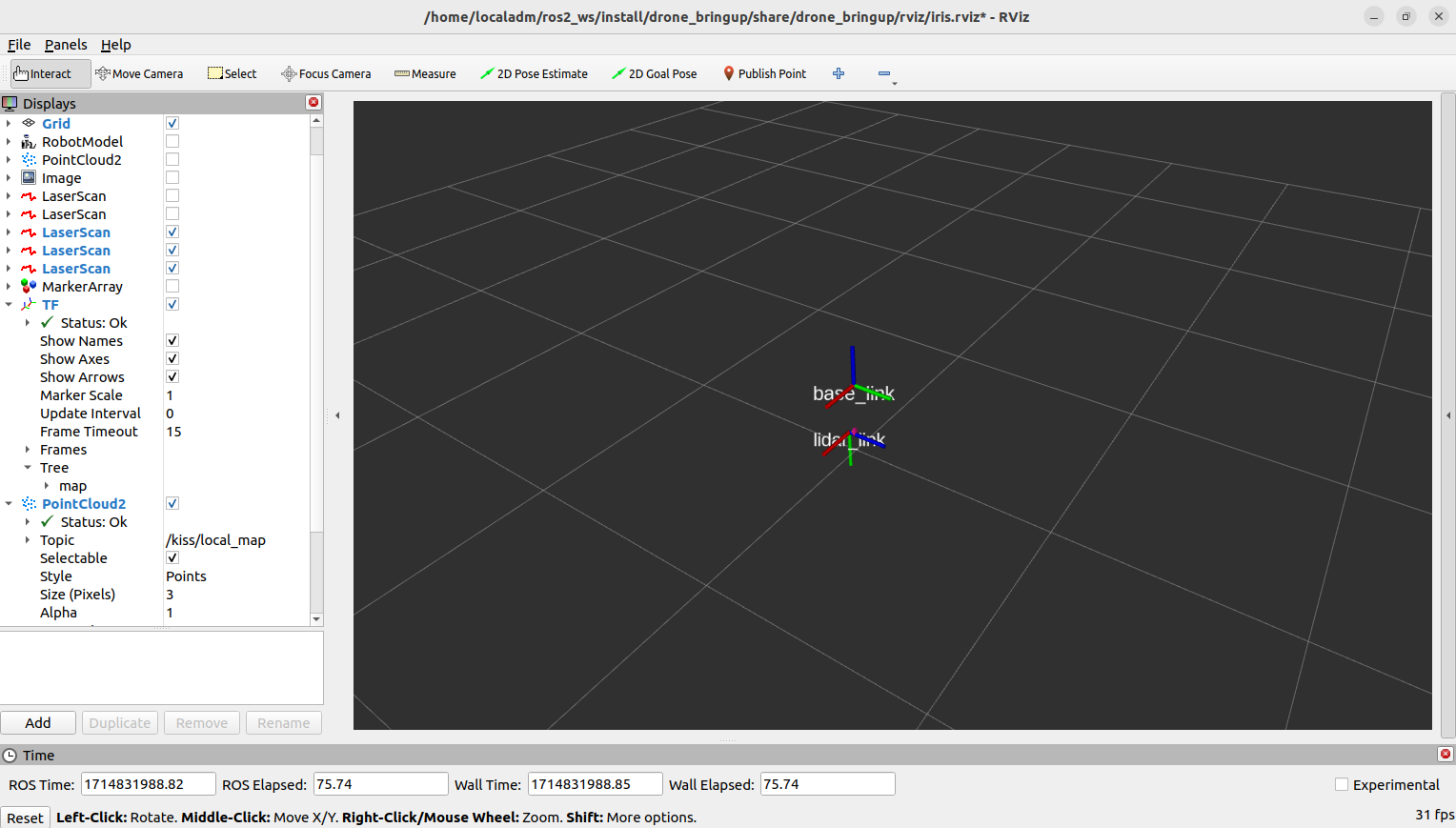
1 week ago Could you capture the screen when localization is not working well? I'm interested in seeing the terminal output, the scan point clouds and what the SLAM estimated trajectory looks like in rviz.
 moralessP
moralessP
First of all, I want to thank you for your great work. I am currently developing a drone for a specific task, and I need to be able to localize it using data from my Velodyne 16 Puck Lite LiDAR. I am currently in simulation using Gazebo version Harmonic and ROS 2 Humble. I have tried this repository on my system simulation, and it seems to have errors in the x and y position estimation. I'm not sure why z is working fine but not the other two dimensions. Should the data from my 3D LiDAR be without NaN values? How should the frame of my LiDAR be related to my base_link?