 stockhuman
commented
4 years ago
stockhuman
commented
4 years ago Hey @OliverXH! I hope you got your project working by now :)
For those here looking for help, here's an example of a glTF (.glb) blender-made-and-exported model loaded into a cannon environment.
This was made with the actively maintained use-cannon, however, the same methodology applies, if you're planning on using shapes that cannon already supports or approximating them yourself:
- Load your 3D model
- convert it to THREE.Geometry
new THREE.Geometry().fromBufferGeometry(<your geo>) - depending on the shape you're using, pass the dimensions of your geometry to a new cannon shape: for a convexpolyhedron (ensure that your model is actually convex!), pass the vertices array as is, and convert the faces array to
Cannon.Vec3()before passing them - Add the resulting body to your scene, as in the bunny demo
Good luck!
 OliverXH
OliverXH

 dirkk0
dirkk0 vik-vev
vik-vev Daudxu
Daudxu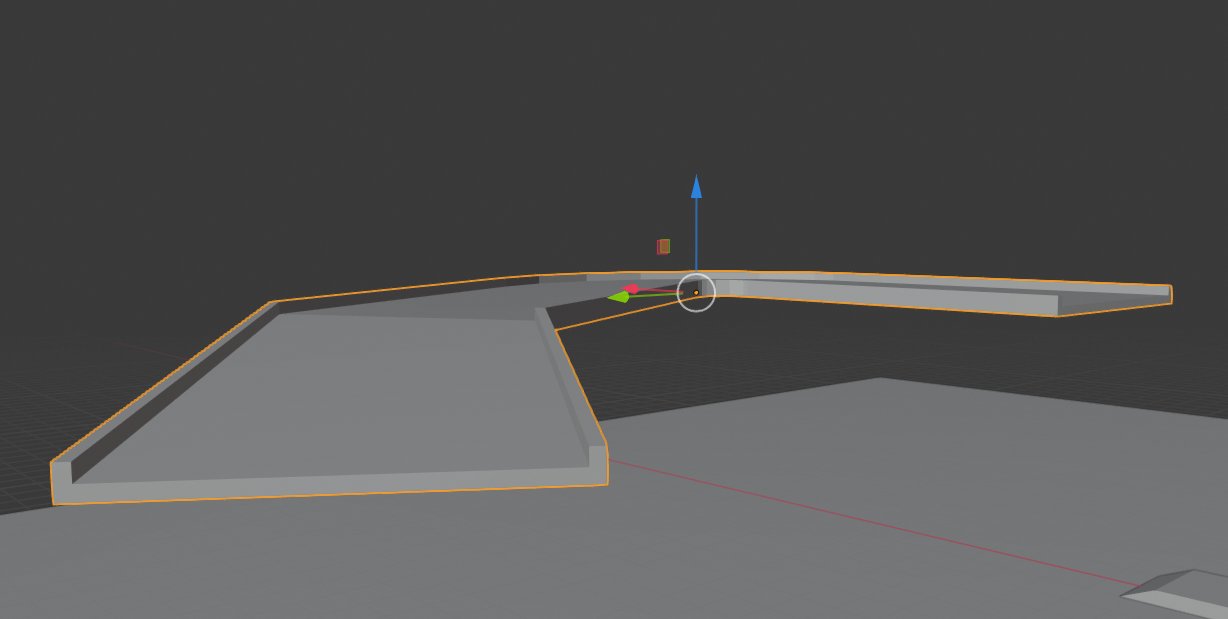{kind=link}
Using Cannonjs as the physical engine in Threejs, how to add collision bodies to the imported model.
Modeling with Blender