 owenduffy
commented
10 years ago
owenduffy
commented
10 years ago I guess you really mean a 4822-390kv.
I did some work with timing tweaks (and had Simon add the offset parameter) some while back. I have written some notes and a calculator you might find helpful at http://owenduffy.net/rc/tools/bldca.htm .
That said, newer releases of SimonK seemed to address most of the problems that timing tweaks circumvented.
High pole count on high voltage is high risk!
FWIW.
Owen
 bighans
bighans sim-
sim-
 edekzkrainykredek
edekzkrainykredek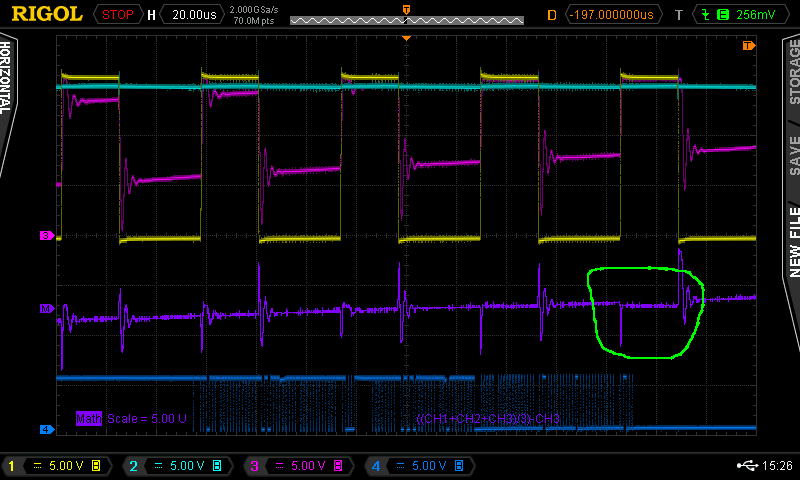{kind=link}
Some background; I have had some problems getting the above to fly reliably. I have narrowed the problem down to the parameters in the firmware. I am using the latest master through the kkMulticopter Flash Tool. Took me some time to get the boot loader enabled on the Afro Esc, have left a friendly note to HK to this effect.
Overall, it flies beautifully. Using 8A on hover. Gives me 30 minutes+, except that one cell is getting poor at the moment. This must be my fifth generation tricopter. The focus is to get long flight times and not exceeding 2.5Kg.
There were issues with the wiring to the motors, HK had just extended the coil wiring (?) and they failed at the connector side (cost me $$).
The problem is that the motors just stutters on large throttle changes, hence I am pitting this up here. and searching the web shows little in terms on how to fix this. The best advice I initially found was to change POWER_RANGE, but this causes a ramp up issue (and a hard landing). However, I am at 1300 now. From stand still, if I give full power, it just flips over. However, from a hover start, it takes off like a rocket. Lots of ooh and aaah from the audience. Note that auto tune from the the laters APM causes me to crash.
The strategy now is to change the TIMING_OFFSET, I have found some references to setting it to between 5-12 from a German website.
The big question is, am I completely out for lunch on this approach? I have no with to re-engineer anyones code, but would be good to have a tool like ecalc for simonk firmware where we could put in some overall parameters and it could advice on the some brackets of parameters to put in.
Any suggestion(s) is greatly appreciated.
Thx, bighans