 alxbilger
commented
2 years ago
alxbilger
commented
2 years ago @rgao15 Thanks a lot for the feedback!
I tried to reproduce your issue. On my end, I do have an error message:
[ERROR] [MouseOperation] ConstraintAttachBody performer cannot be created with the picked model.Let us know if you have the same error message. I am also on Windows.
Anyway, I tried to understand what's happening. Why ConstraintAttachBody cannot be created?
It is supposed to be added in a factory here : https://github.com/sofa-framework/sofa/blob/323e20e4168e1ab5b67352f4621d4f1b3fa39be9/modules/SofaConstraint/src/SofaConstraint/ConstraintAttachBodyPerformer.cpp#L38
Registration in the factory works BUT not in the right factory.
The factory in modules/SofaGuiCommon/src/sofa/gui/MouseOperations.cpp and in modules/SofaConstraint/src/SofaConstraint/ConstraintAttachBodyPerformer.cpp are different. The factory is a singleton but there are 2 different instances. I confirmed it by printing the factory address. I suspect it's because they are used in different libraries.
The question is: how to solve it? And is it the same story for other factories? @fredroy @damienmarchal I would need your help
 fredroy
fredroy
 ruiliang-gao
ruiliang-gao hugtalbot
hugtalbot
Problem
Description BilateralInteractionConstraint doesn't work for me anymore when I upgraded to sofa v21.06.
Steps to reproduce v21.06 builds well on my pc. In the demo/caduceus.scn I set the Mouse left button to “attach object using Bilateral constraint” but I can not grasp the snake using the mouse. (see screenshot attached)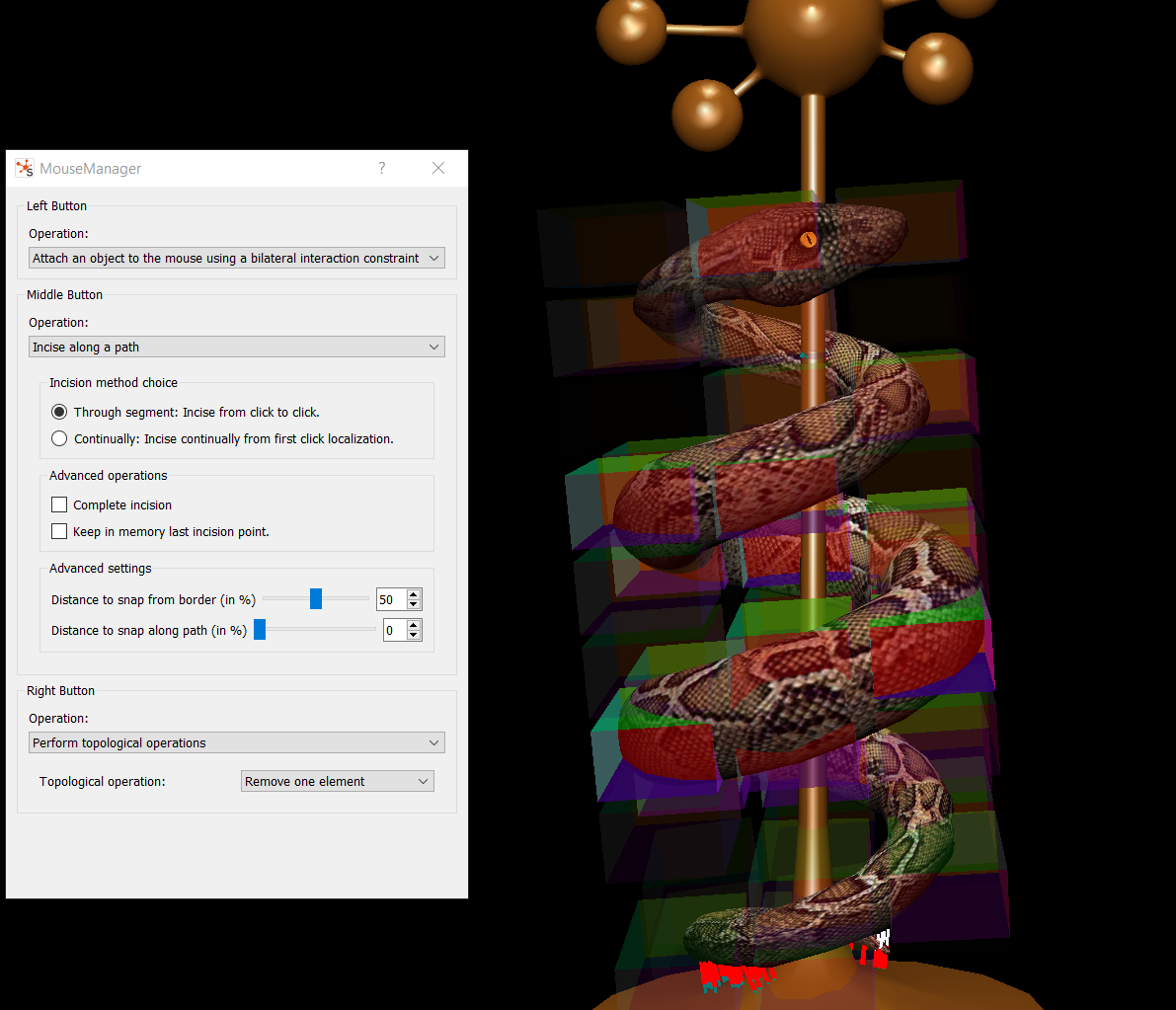
Another example is in my scene i attached the gallbladder model to the fatty tissue behind it using Bilateral constraint, i checked the rendering interactions, which visualize the Bilateral constraint contact pairs using Pink dots. Based on the screenshot, the contact points are correctly visualized but they can still move apart as if no constraints at all. (see screenshot attached)
Expected behavior In our plugins we have used the following to establish the bilaterial constraints. _sofa::component::constraintset::BilateralInteractionConstraint::SPtr
toolState.mconstraints->addContact(c.normal, c.point[0], c.point[1], distance, index1, index2, c.point[0], c.point[1], 1, c.id);
The same codes and scene files worked well in sofa v19.12, where the bilateral constraints worked as constraining the distances between the contact pairs.
Environment
Context
Command called
Env vars
Logs
Full output
Content of build_dir/CMakeCache.txt
< DRAG AND DROP YOUR CMAKECACHE.TXT HERE >
Thank you for your report.