johann-petrak
commented
1 year ago
johann-petrak
commented
1 year ago I am pretty sure this happens if one of the angles values is float("nan")
It may be useful for the library to either ignore any NaN value or throw an exception giving the reason.
 mbusy
mbusy
I have written a simple program which receives joint and speed data and sends it to the VirtualPepper robot using the
pepper.setAngles(names, angles, speeds)method.This works quite well for a while but suddenly the robot just disappears from the simulation in the GUI. However now exception is thrown and nothing is shown on the console.
When would this happen? How is it possible to debug what could cause this?
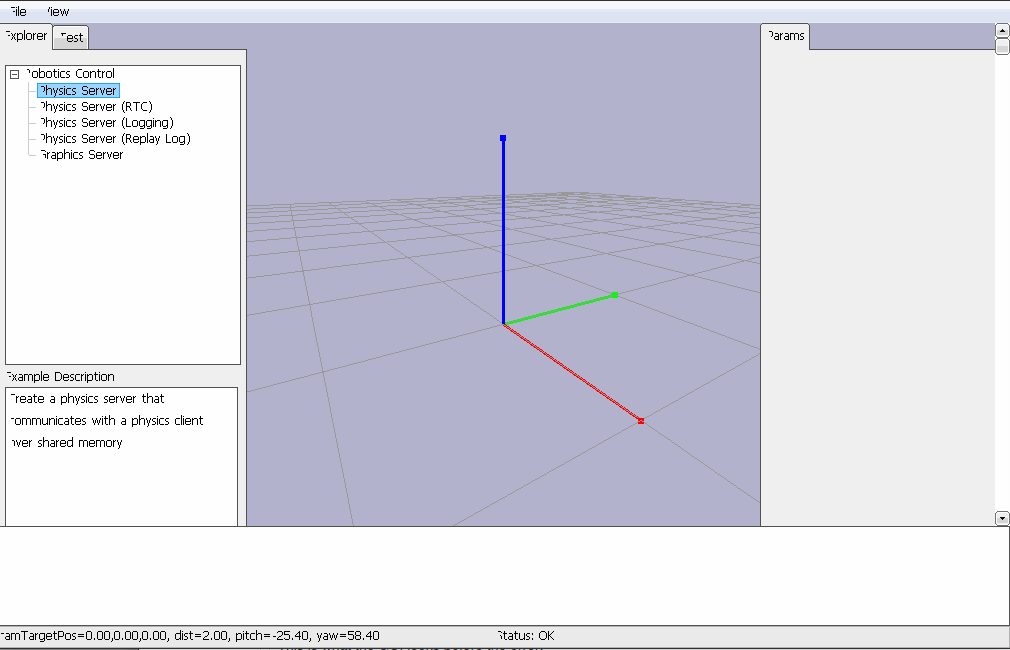
This is what the GUI looks before the error: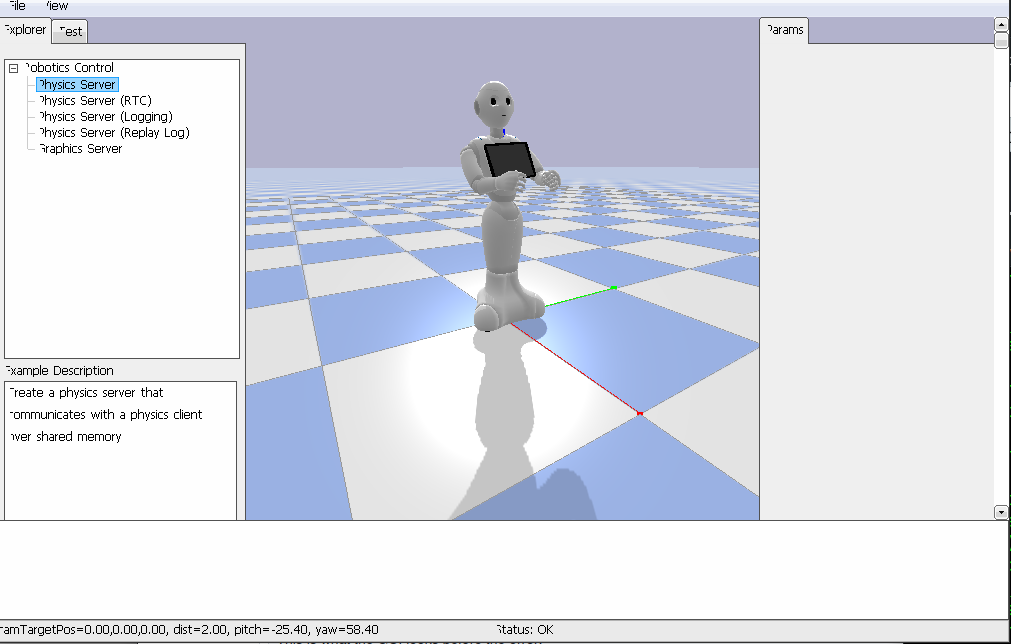
This is what the GUI looks after the error: