 haavarpb
commented
2 years ago
haavarpb
commented
2 years ago Hi, again.
I have now tried a different platform, using windows with the same issue. Still using pyzed 3.7 and CUDA 10.2 on this specific machine.
I'll paste a minimal example where I have modified your body tracking example python application. Observe that the local orientation per joint is [0,0,0,1] or very close.
########################################################################
#
# Copyright (c) 2021, STEREOLABS.
#
# All rights reserved.
#
# THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
# "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
# LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
# A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
# OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
# SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
# LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
# DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
# THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
# (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
# OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
#
########################################################################
import pyzed.sl as sl
import numpy as np
def main():
# Create a Camera object
zed = sl.Camera()
# Create a InitParameters object and set configuration parameters
init_params = sl.InitParameters()
init_params.camera_resolution = sl.RESOLUTION.HD720 # Use HD720 video mode
init_params.depth_mode = sl.DEPTH_MODE.PERFORMANCE
init_params.coordinate_units = sl.UNIT.METER
init_params.sdk_verbose = True
# Open the camera
err = zed.open(init_params)
if err != sl.ERROR_CODE.SUCCESS:
exit(1)
obj_param = sl.ObjectDetectionParameters()
obj_param.enable_tracking = True
obj_param.image_sync = True
obj_param.enable_mask_output = True
obj_param.enable_body_fitting = True
obj_param.detection_model = sl.DETECTION_MODEL.HUMAN_BODY_ACCURATE
obj_param.body_format = sl.BODY_FORMAT.POSE_34
camera_infos = zed.get_camera_information()
if obj_param.enable_tracking:
positional_tracking_param = sl.PositionalTrackingParameters()
# positional_tracking_param.set_as_static = True
positional_tracking_param.set_floor_as_origin = True
zed.enable_positional_tracking(positional_tracking_param)
print("Object Detection: Loading Module...")
err = zed.enable_object_detection(obj_param)
if err != sl.ERROR_CODE.SUCCESS:
print(repr(err))
zed.close()
exit(1)
objects = sl.Objects()
obj_runtime_param = sl.ObjectDetectionRuntimeParameters()
obj_runtime_param.detection_confidence_threshold = 40
while zed.grab() == sl.ERROR_CODE.SUCCESS:
err = zed.retrieve_objects(objects, obj_runtime_param)
if objects.is_new:
obj_array = objects.object_list
print(str(len(obj_array)) + " Object(s) detected\n")
if len(obj_array) > 0:
first_object = obj_array[0]
print("First object attributes:")
print(
" Label '"
+ repr(first_object.label)
+ "' (conf. "
+ str(int(first_object.confidence))
+ "/100)"
)
if obj_param.enable_tracking:
print(
" Tracking ID: "
+ str(int(first_object.id))
+ " tracking state: "
+ repr(first_object.tracking_state)
+ " / "
+ repr(first_object.action_state)
)
position = first_object.position
velocity = first_object.velocity
dimensions = first_object.dimensions
print(
" 3D position: [{0},{1},{2}]\n Velocity: [{3},{4},{5}]\n 3D dimentions: [{6},{7},{8}]".format(
position[0],
position[1],
position[2],
velocity[0],
velocity[1],
velocity[2],
dimensions[0],
dimensions[1],
dimensions[2],
)
)
if first_object.mask.is_init():
print(" 2D mask available")
print(" Bounding Box 2D ")
bounding_box_2d = first_object.bounding_box_2d
for it in bounding_box_2d:
print(" " + str(it), end="")
print("\n Bounding Box 3D ")
bounding_box = first_object.bounding_box
for it in bounding_box:
print(" " + str(it), end="")
orientations = first_object.local_orientation_per_joint
for it in orientations:
print(" "+str(it), end='')
input("\nPress enter to continue: ")
# Close the camera
zed.close()
if __name__ == "__main__":
main()
 github-actions[bot]
github-actions[bot] PVLukas
PVLukas CSE-JS
CSE-JS Jonny-air
Jonny-air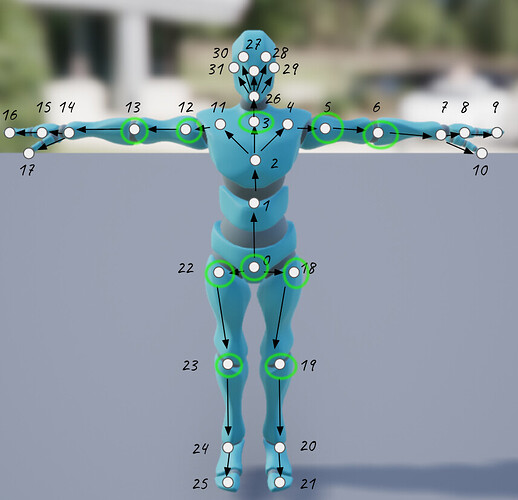{kind=link}
Preliminary Checks
Description
Hi, title says it. Global orientation works, however local_orientation_per_joint seems not to work.
I have tried to look for similar issues, and I have checked my parameters for the camera as per the documentation, but I can't seem to get them to work.
Steps to Reproduce
Run this file in ros2.
Expected Result
I expect getting local orientation per joint to change over time, not stay still.
Actual Result
Title.
ZED Camera model
ZED2
Environment
Anything else?
No response