 Myzhar
commented
3 years ago
Myzhar
commented
3 years ago Hi @lnikki this is strange. Can you post the console log?
Closed lnikki closed 2 years ago
Myzhar
commented
3 years ago Hi @lnikki this is strange. Can you post the console log?
 lnikki
commented
3 years ago
lnikki
commented
3 years ago WARNING: Package name "ZED_Object_detection_image_viewer" does not follow the naming conventions. It should start with a lower case letter and only contain lower case letters, digits, underscores, and dashes. WARNING: Package name "ZED_Spatial_Mapping" does not follow the naming conventions. It should start with a lower case letter and only contain lower case letters, digits, underscores, and dashes. WARNING: Package name "ZED_Depth_Sensing" does not follow the naming conventions. It should start with a lower case letter and only contain lower case letters, digits, underscores, and dashes. WARNING: Package name "ZED_Point_Cloud_Mapping" does not follow the naming conventions. It should start with a lower case letter and only contain lower case letters, digits, underscores, and dashes. WARNING: Package name "ZED_Camera_Control" does not follow the naming conventions. It should start with a lower case letter and only contain lower case letters, digits, underscores, and dashes. WARNING: Package name "ZED_Body_Tracking" does not follow the naming conventions. It should start with a lower case letter and only contain lower case letters, digits, underscores, and dashes. ... logging to /home/nuannuan/.ros/log/27901b84-ef53-11eb-838b-e99943524033/roslaunch-nuannuan-Lenovo-XiaoXinPro-13IML-2020-11493.log Checking log directory for disk usage. This may take a while. Press Ctrl-C to interrupt Done checking log file disk usage. Usage is <1GB.
WARNING: Package name "ZED_Object_detection_image_viewer" does not follow the naming conventions. It should start with a lower case letter and only contain lower case letters, digits, underscores, and dashes. WARNING: Package name "ZED_Spatial_Mapping" does not follow the naming conventions. It should start with a lower case letter and only contain lower case letters, digits, underscores, and dashes. WARNING: Package name "ZED_Depth_Sensing" does not follow the naming conventions. It should start with a lower case letter and only contain lower case letters, digits, underscores, and dashes. WARNING: Package name "ZED_Point_Cloud_Mapping" does not follow the naming conventions. It should start with a lower case letter and only contain lower case letters, digits, underscores, and dashes. WARNING: Package name "ZED_Camera_Control" does not follow the naming conventions. It should start with a lower case letter and only contain lower case letters, digits, underscores, and dashes. WARNING: Package name "ZED_Body_Tracking" does not follow the naming conventions. It should start with a lower case letter and only contain lower case letters, digits, underscores, and dashes. started roslaunch server http://nuannuan-lenovo-xiaoxinpro-13iml-2020:35939/
PARAMETERS
NODES /zed2/ zed2_state_publisher (robot_state_publisher/robot_state_publisher) zed_node (zed_wrapper/zed_wrapper_node)
auto-starting new master process[master]: started with pid [11503] ROS_MASTER_URI=http://nuannuan-lenovo-xiaoxinpro-13iml-2020:11311
setting /run_id to 27901b84-ef53-11eb-838b-e99943524033 WARNING: Package name "ZED_Object_detection_image_viewer" does not follow the naming conventions. It should start with a lower case letter and only contain lower case letters, digits, underscores, and dashes. WARNING: Package name "ZED_Spatial_Mapping" does not follow the naming conventions. It should start with a lower case letter and only contain lower case letters, digits, underscores, and dashes. WARNING: Package name "ZED_Depth_Sensing" does not follow the naming conventions. It should start with a lower case letter and only contain lower case letters, digits, underscores, and dashes. WARNING: Package name "ZED_Point_Cloud_Mapping" does not follow the naming conventions. It should start with a lower case letter and only contain lower case letters, digits, underscores, and dashes. WARNING: Package name "ZED_Camera_Control" does not follow the naming conventions. It should start with a lower case letter and only contain lower case letters, digits, underscores, and dashes. WARNING: Package name "ZED_Body_Tracking" does not follow the naming conventions. It should start with a lower case letter and only contain lower case letters, digits, underscores, and dashes. process[rosout-1]: started with pid [11513] started core service [/rosout] process[zed2/zed2_state_publisher-2]: started with pid [11520] process[zed2/zed_node-3]: started with pid [11521] [ INFO] [1627442602.028787955]: Initializing nodelet with 12 worker threads. [ INFO] [1627442602.058994787]: ** Starting nodelet '/zed2/zed_node' ** [ INFO] [1627442602.059127445]: SDK version : 3.5.0 [ INFO] [1627442602.059188831]: GENERAL PARAMETERS [ INFO] [1627442602.060053785]: Camera Name -> zed2 [ INFO] [1627442602.061001712]: Camera Resolution -> HD720 [ INFO] [1627442602.061966903]: Camera Grab Framerate -> 30 [ INFO] [1627442602.062887462]: Gpu ID -> -1 [ INFO] [1627442602.063804921]: Camera ID -> -1 [ INFO] [1627442602.064745940]: Verbose -> DISABLED [ INFO] [1627442602.066572823]: Camera Flip -> DISABLED [ INFO] [1627442602.068306560]: Self calibration -> ENABLED [ INFO] [1627442602.070104937]: * Camera Model by param -> zed2 [ INFO] [1627442602.070190980]: VIDEO PARAMETERS [ INFO] [1627442602.071154079]: Image resample factor -> 1 [ INFO] [1627442602.072021519]: Extrinsic param. frame -> X RIGHT - Y DOWN - Z FWD [ INFO] [1627442602.072072160]: DEPTH PARAMETERS [ INFO] [1627442602.072932556]: Depth quality -> PERFORMANCE [ INFO] [1627442602.073735499]: Depth Sensing mode -> STANDARD [ INFO] [1627442602.074660738]: OpenNI mode -> DISABLED [ INFO] [1627442602.075593785]: Depth Stabilization -> ENABLED [ INFO] [1627442602.076473992]: Minimum depth -> 0.3 m [ INFO] [1627442602.077410356]: Maximum depth -> 20 m [ INFO] [1627442602.078360426]: * Depth resample factor -> 1 [ INFO] [1627442602.078422287]: POSITIONAL TRACKING PARAMETERS [ INFO] [1627442602.080118584]: Positional tracking -> ENABLED [ INFO] [1627442602.081088814]: Path rate -> 2 Hz [ INFO] [1627442602.081901602]: Path history size -> 1 [ INFO] [1627442602.083532059]: Odometry DB path -> [ INFO] [1627442602.084931795]: Spatial Memory -> ENABLED [ INFO] [1627442602.086404065]: IMU Fusion -> ENABLED [ INFO] [1627442602.088098299]: Floor alignment -> DISABLED [ INFO] [1627442602.089736577]: Init Odometry with first valid pose data -> ENABLED [ INFO] [1627442602.091459312]: * Two D mode -> DISABLED [ INFO] [1627442602.093049152]: MAPPING PARAMETERS [ INFO] [1627442602.094482630]: * Mapping -> DISABLED [ INFO] [1627442602.094541435]: OBJECT DETECTION PARAMETERS [ INFO] [1627442602.095839088]: * Object Detection -> DISABLED [ INFO] [1627442602.095884789]: SENSORS PARAMETERS [ INFO] [1627442602.096630569]: * Sensors timestamp sync -> DISABLED [ INFO] [1627442602.096693564]: SVO PARAMETERS [ INFO] [1627442602.098150755]: SVO input file: -> [ INFO] [1627442602.098934081]: SVO REC compression -> H265 (HEVC) [ INFO] [1627442602.100217810]: COORDINATE FRAMES [ INFO] [1627442602.104130309]: map_frame -> map [ INFO] [1627442602.104190009]: odometry_frame -> odom [ INFO] [1627442602.104229660]: base_frame -> base_link [ INFO] [1627442602.104264782]: camera_frame -> zed2_camera_center [ INFO] [1627442602.104296300]: imu_link -> zed2_imu_link [ INFO] [1627442602.104331249]: left_camera_frame -> zed2_left_camera_frame [ INFO] [1627442602.104364438]: left_camera_optical_frame -> zed2_left_camera_optical_frame [ INFO] [1627442602.104395405]: right_camera_frame -> zed2_right_camera_frame [ INFO] [1627442602.104426465]: right_camera_optical_frame -> zed2_right_camera_optical_frame [ INFO] [1627442602.104460307]: depth_frame -> zed2_left_camera_frame [ INFO] [1627442602.104494204]: depth_optical_frame -> zed2_left_camera_optical_frame [ INFO] [1627442602.104529341]: disparity_frame -> zed2_left_camera_frame [ INFO] [1627442602.104563007]: disparity_optical_frame -> zed2_left_camera_optical_frame [ INFO] [1627442602.104597188]: confidence_frame -> zed2_left_camera_frame [ INFO] [1627442602.104630468]: confidence_optical_frame -> zed2_left_camera_optical_frame [ INFO] [1627442602.106969350]: Broadcast odometry TF -> ENABLED [ INFO] [1627442602.109332309]: Broadcast map pose TF -> ENABLED [ INFO] [1627442602.111050575]: Broadcast IMU pose TF -> ENABLED [ INFO] [1627442602.111113360]: DYNAMIC PARAMETERS (Init. values) [ INFO] [1627442602.112037182]: [DYN] Depth confidence -> 50 [ INFO] [1627442602.112939008]: [DYN] Depth texture conf. -> 100 [ INFO] [1627442602.113841243]: [DYN] pub_frame_rate -> 15 Hz [ INFO] [1627442602.114750202]: [DYN] point_cloud_freq -> 15 Hz [ INFO] [1627442602.115650924]: [DYN] brightness -> 4 [ INFO] [1627442602.116547576]: [DYN] contrast -> 4 [ INFO] [1627442602.117569876]: [DYN] hue -> 0 [ INFO] [1627442602.118596578]: [DYN] saturation -> 4 [ INFO] [1627442602.119634294]: [DYN] sharpness -> 4 [ INFO] [1627442602.120648182]: [DYN] gamma -> 8 [ INFO] [1627442602.121604983]: [DYN] auto_exposure_gain -> ENABLED [ INFO] [1627442602.124275354]: [DYN] auto_whitebalance -> ENABLED [ INFO] [1627442602.135294737]: * Camera coordinate system -> Right HANDED Z UP and X FORWARD [ INFO] [1627442602.135403321]: *** Opening ZED 2... [ INFO] [1627442603.642684785]: ZED connection -> SUCCESS [ INFO] [1627442605.643033830]: ... ZED ready [ INFO] [1627442605.643116572]: ZED SDK running on GPU #0 [ INFO] [1627442605.652959780]: Camera-IMU Transform: 55B01F980080 0.999969 0.007627 0.001899 -0.002000 -0.007628 0.999971 0.000803 -0.023000 -0.001893 -0.000817 0.999998 -0.002000 0.000000 0.000000 0.000000 1.000000
[ INFO] [1627442605.653042544]: CAMERA MODEL -> ZED 2 [ INFO] [1627442605.653109598]: Serial Number -> 20084364 [ INFO] [1627442605.653170866]: Camera FW Version -> 1523 [ INFO] [1627442605.653228639]: Sensors FW Version -> 776 [ INFO] [1627442606.099225026]: Advertised on topic /zed2/zed_node/rgb/image_rect_color [ INFO] [1627442606.099339047]: Advertised on topic /zed2/zed_node/rgb/camera_info [ INFO] [1627442606.155947665]: Advertised on topic /zed2/zed_node/rgb_raw/image_raw_color [ INFO] [1627442606.156041555]: Advertised on topic /zed2/zed_node/rgb_raw/camera_info [ INFO] [1627442606.210173689]: Advertised on topic /zed2/zed_node/left/image_rect_color [ INFO] [1627442606.210267719]: Advertised on topic /zed2/zed_node/left/camera_info [ INFO] [1627442606.266099649]: Advertised on topic /zed2/zed_node/left_raw/image_raw_color [ INFO] [1627442606.266180838]: Advertised on topic /zed2/zed_node/left_raw/camera_info [ INFO] [1627442606.321300224]: Advertised on topic /zed2/zed_node/right/image_rect_color [ INFO] [1627442606.321386937]: Advertised on topic /zed2/zed_node/right/camera_info [ INFO] [1627442606.375468918]: Advertised on topic /zed2/zed_node/right_raw/image_raw_color [ INFO] [1627442606.375558441]: Advertised on topic /zed2/zed_node/right_raw/camera_info [ INFO] [1627442606.423836428]: Advertised on topic /zed2/zed_node/rgb/image_rect_gray [ INFO] [1627442606.423924909]: Advertised on topic /zed2/zed_node/rgb/camera_info [ INFO] [1627442606.470655688]: Advertised on topic /zed2/zed_node/rgb_raw/image_raw_gray [ INFO] [1627442606.470744565]: Advertised on topic /zed2/zed_node/rgb_raw/camera_info [ INFO] [1627442606.520630744]: Advertised on topic /zed2/zed_node/left/image_rect_gray [ INFO] [1627442606.520727380]: Advertised on topic /zed2/zed_node/left/camera_info [ INFO] [1627442606.570759478]: Advertised on topic /zed2/zed_node/left_raw/image_raw_gray [ INFO] [1627442606.570869681]: Advertised on topic /zed2/zed_node/left_raw/camera_info [ INFO] [1627442606.618769782]: Advertised on topic /zed2/zed_node/right/image_rect_gray [ INFO] [1627442606.618894307]: Advertised on topic /zed2/zed_node/right/camera_info [ INFO] [1627442606.667061307]: Advertised on topic /zed2/zed_node/right_raw/image_raw_gray [ INFO] [1627442606.667166058]: Advertised on topic /zed2/zed_node/right_raw/camera_info [ INFO] [1627442606.719516489]: Advertised on topic /zed2/zed_node/depth/depth_registered [ INFO] [1627442606.719627481]: Advertised on topic /zed2/zed_node/depth/camera_info [ INFO] [1627442606.773682847]: Advertised on topic /zed2/zed_node/stereo/image_rect_color [ INFO] [1627442606.822100709]: Advertised on topic /zed2/zed_node/stereo_raw/image_raw_color [ INFO] [1627442606.823251870]: Advertised on topic /zed2/zed_node/confidence/confidence_map [ INFO] [1627442606.824475867]: Advertised on topic /zed2/zed_node/disparity/disparity_image [ INFO] [1627442606.825637662]: Advertised on topic /zed2/zed_node/point_cloud/cloud_registered [ INFO] [1627442606.826820620]: Advertised on topic /zed2/zed_node/pose [ INFO] [1627442606.828038748]: Advertised on topic /zed2/zed_node/pose_with_covariance [ INFO] [1627442606.829433602]: Advertised on topic /zed2/zed_node/odom [ INFO] [1627442606.830660189]: Advertised on topic /zed2/zed_node/path_odom [ INFO] [1627442606.831932363]: Advertised on topic /zed2/zed_node/path_map [ INFO] [1627442606.833322849]: Advertised on topic /zed2/zed_node/imu/data [ INFO] [1627442606.834552623]: Advertised on topic /zed2/zed_node/imu/data_raw [ INFO] [1627442606.835804933]: Advertised on topic /zed2/zed_node/imu/mag [ INFO] [1627442606.836916895]: Advertised on topic /zed2/zed_node/temperature/imu [ INFO] [1627442606.838121378]: Advertised on topic /zed2/zed_node/atm_press [ INFO] [1627442606.839307839]: Advertised on topic /zed2/zed_node/temperature/left [ INFO] [1627442606.840457670]: Advertised on topic /zed2/zed_node/temperature/right [ INFO] [1627442606.841750243]: Advertised on topic /zed2/zed_node/left_cam_imu_transform [LATCHED] [ INFO] [1627442606.856268105]: Starting Positional Tracking [ INFO] [1627442606.856377112]: Waiting for valid static transformations... [ INFO] [1627442606.856565024]: Static transform Sensor to Base [zed2_left_camera_frame -> base_link] [ INFO] [1627442606.856659190]: Translation: {0.000,-0.060,0.000} [ INFO] [1627442606.856739501]: Rotation: {0.000,-0.000,0.000} [ INFO] [1627442606.856898843]: Static transform Sensor to Camera Center [zed2_left_camera_frame -> zed2_camera_center] [ INFO] [1627442606.856972752]: Translation: {0.000,-0.060,0.000} [ INFO] [1627442606.857070007]: Rotation: {0.000,-0.000,0.000} [ INFO] [1627442606.857147470]: Static transform Camera Center to Base [zed2_camera_center -> base_link] [ INFO] [1627442606.857281596]: Translation: {0.000,0.000,0.000} [ INFO] [1627442606.857355520]: Rotation: {0.000,-0.000,0.000} [ INFO] [1627442606.957579189]: Initial ZED left camera pose (ZED pos. tracking): [ INFO] [1627442606.957792036]: T: [0,0.06,0] [ INFO] [1627442606.957925938]: * Q: [0,0,0,1] [ INFO] [1627442607.301221548]: Odometry aligned to last tracking pose @Myzhar
Myzhar
commented
3 years ago The log of the ZED Wrapper is correct. Can you run the $ roswtf command while all the nodes are running and post the log to see if there is something wrong at ROS level?
lnikki
commented
3 years ago Static checks summary:
Found 1 warning(s). Warnings are things that may be just fine, but are sometimes at fault
WARNING ROS_HOSTNAME may be incorrect: ROS_HOSTNAME [nuannuan-lenovo-xiaoxinpro-13iml-2020] resolves to [127.0.1.1], which does not appear to be a local IP address ['127.0.0.1'].
================================================================================
ROS Master does not appear to be running. Online graph checks will not be run. ROS_MASTER_URI is [http://nuannuan-lenovo-xiaoxinpro-13iml-2020:11311] @Myzhar
Myzhar
commented
3 years ago Are the nodes running? You must call roswtf in a new console when all the nodes are running
lnikki
commented
3 years ago Static checks summary:
Found 1 warning(s). Warnings are things that may be just fine, but are sometimes at fault
WARNING ROS_HOSTNAME may be incorrect: ROS_HOSTNAME [nuannuan-lenovo-xiaoxinpro-13iml-2020] resolves to [127.0.1.1], which does not appear to be a local IP address ['127.0.0.1', '192.168.43.217'].
================================================================================ Beginning tests of your ROS graph. These may take a while... analyzing graph... ... done analyzing graph running graph rules... ... done running graph rules running tf checks, this will take a second... ... tf checks complete
Online checks summary:
Found 2 warning(s). Warnings are things that may be just fine, but are sometimes at fault
WARNING The following node subscriptions are unconnected:
WARNING No tf messages
@Myzhar
Myzhar
commented
3 years ago Please run also $ rqt_graph and post the graph that it generates
lnikki
commented
3 years ago  @Myzhar
@Myzhar
Myzhar
commented
3 years ago The nodes graph is correct too. IS it possible that you changed any parameters breaking up the TF chain?
Have you tried changing the base_frame, the map_frame, or the odometry_frame parameters?
Can you please attach the common.yaml and zed2.yaml file?
lnikki
commented
3 years ago I didn't change any of the parameters @Myzhar common.yaml
brightness: 4 # Dynamic
contrast: 4 # Dynamic
hue: 0 # Dynamic
saturation: 4 # Dynamic
sharpness: 4 # Dynamic
gamma: 8 # Dynamic - Requires SDK >=v3.1
auto_exposure_gain: true # Dynamic
gain: 100 # Dynamic - works only if auto_exposure_gain is false
exposure: 100 # Dynamic - works only if auto_exposure_gain is false
auto_whitebalance: true # Dynamic
whitebalance_temperature: 42 # Dynamic - works only if auto_whitebalance is false
depth_confidence: 50 # Dynamic
depth_texture_conf: 100 # Dynamic
pub_frame_rate: 15.0 # Dynamic - frequency of publishing of video and depth data
point_cloud_freq: 15.0 # Dynamic - frequency of the pointcloud publishing (equal or less to grab_frame_rate value)
general:
camera_name: zed # A name for the camera (can be different from camera model and node name and can be overwritten by the launch file)
zed_id: 0
serial_number: 0
resolution: 2 # '0': HD2K, '1': HD1080, '2': HD720, '3': VGA
grab_frame_rate: 30 # Frequency of frame grabbing for internal SDK operations
gpu_id: -1
base_frame: 'base_link' # must be equal to the frame_id used in the URDF file
verbose: false # Enable info message by the ZED SDK
svo_compression: 2 # 0: LOSSLESS, 1: AVCHD, 2: HEVC
self_calib: true # enable/disable self calibration at starting
camera_flip: false
video:
img_downsample_factor: 1.0 # Resample factor for images [0.01,1.0] The SDK works with native image sizes, but publishes rescaled image.
extrinsic_in_camera_frame: true # if false extrinsic parameter in camera_info will use ROS native frame (X FORWARD, Z UP) instead of the camera frame (Z FORWARD, Y DOWN) [true use old behavior as for version < v3.1]
depth:
quality: 1 # '0': NONE, '1': PERFORMANCE, '2': QUALITY, '3': ULTRA
sensing_mode: 0 # '0': STANDARD, '1': FILL (not use FILL for robotic applications)
depth_stabilization: 1 # 0: disabled, 1: enabled
openni_depth_mode: false # 'false': 32bit float meters, 'true': 16bit uchar millimeters
depth_downsample_factor: 1.0 # Resample factor for depth data matrices [0.01,1.0] The SDK works with native data sizes, but publishes rescaled matrices (depth map, point cloud, ...)
pos_tracking:
pos_tracking_enabled: true # True to enable positional tracking from start
publish_tf: true # publish odom -> base_link TF
publish_map_tf: true # publish map -> odom TF
map_frame: 'map'
odometry_frame: 'odom'
area_memory_db_path: ''
area_memory: true # Enable to detect loop closure
floor_alignment: false # Enable to automatically calculate camera/floor offset
initial_base_pose: [0.0,0.0,0.0, 0.0,0.0,0.0] # Initial position of the base_frame -> [X, Y, Z, R, P, Y]
init_odom_with_first_valid_pose: true # Enable to initialize the odometry with the first valid pose
path_pub_rate: 2.0 # Camera trajectory publishing frequency
path_max_count: -1 # use '-1' for unlimited path size
two_d_mode: false # Force navigation on a plane. If true the Z value will be fixed to "fixed_z_value", roll and pitch to zero
fixed_z_value: 0.00 # Value to be used for Z coordinate if two_d_mode is true
mapping: mapping_enabled: false # True to enable mapping and fused point cloud pubblication resolution: 0.05 # maps resolution in meters [0.01f, 0.2f] max_mapping_range: -1 # maximum depth range while mapping in meters (-1 for automatic calculation) [2.0, 20.0] fused_pointcloud_freq: 1.0 # frequency of the publishing of the fused colored point cloud
zed2.yaml

Myzhar
commented
3 years ago At this point, the only problem that I notice with your system is the warning about the IP address that $ roswtf writes out:
WARNING ROS_HOSTNAME may be incorrect: ROS_HOSTNAME [nuannuan-lenovo-xiaoxinpro-13iml-2020] resolves to [127.0.1.1], which does not appear to be a local IP address ['127.0.0.1'].Please check it.
Furthermore, be sure that no other node is publishing the odom TF that can be in conflict with the ZED odom TF.
lnikki
commented
3 years ago I corrected the wranning,but the problem still hasn't been resolved.
When I only $roslaunch zed_wrapper zed2.launch , $ roswtf writes out:
 @Myzhar
@Myzhar
Myzhar
commented
3 years ago I have no more ideas about what can generate your problem. The ZED ROS Wrapper is well tested and following the installation guide you should get a working system.
Try to delete the <catkin_ws>/src/zed-ros-wrapper and the <catkin_ws>/src/zed-ros-examples folders and reinstall both from scratch, following the instructions of the README file.
Please be sure to use the latest version of the ZED SDK to exclude any possible compatibility problem.
lnikki
commented
3 years ago Thanks for your advice, but I downloaded the SDK 3.5.1 and it still doesn't work. Could you please tell me the program for publishing the imu topic separately? @Myzhar
Myzhar
commented
3 years ago There is not a program to publish the IMU topic separately. What do you mean with it? Maybe I misunderstood the question...
PS the SDK v3.5.1 would not fix your issue that's not related to the ZED SDK itself, but highly probably it's because a misconfiguration of your system
lnikki
commented
3 years ago There is no data for the IMU topic I published using zed-ros-wrapper, so I would like to ask if there is a C file for publishing the IMU topic. I will check the system again.Thanks! @Myzhar
Myzhar
commented
3 years ago @lnikki are you sure that your camera is working as expected.
As you can see in the following screenshot everything works as expected using:
$ roslaunch zed_wrapper zed2.launch
and
$ rostopic echo /zed2/zed_node/imu/data

Can you please run the ZED_Diagnostic command and upload the report it generates?
lnikki
commented
3 years ago ZED_Diagnostic_Results.txt @Myzhar
Myzhar
commented
3 years ago @lnikki the camera is correctly detected and the OS is correctly configured. The GPU is not really powerful, but it is good enough to correctly run the ZED node with the default parameters.
Have you tried on another PC if you have the same problems?
lnikki
commented
3 years ago My friend's computer can use it, but I don't know what's wrong with mine. @Myzhar
 github-actions[bot]
commented
2 years ago
github-actions[bot]
commented
2 years ago This issue is stale because it has been open 30 days with no activity. Remove stale label or comment or this will be closed in 5 days
Describe the bug When I roslaunch zed_wrapper zed2.launch ,tf_tree is not correct and the MAP ODOM IMU is missing.There is no output on the topic of imu_data.
Device information:
Screenshots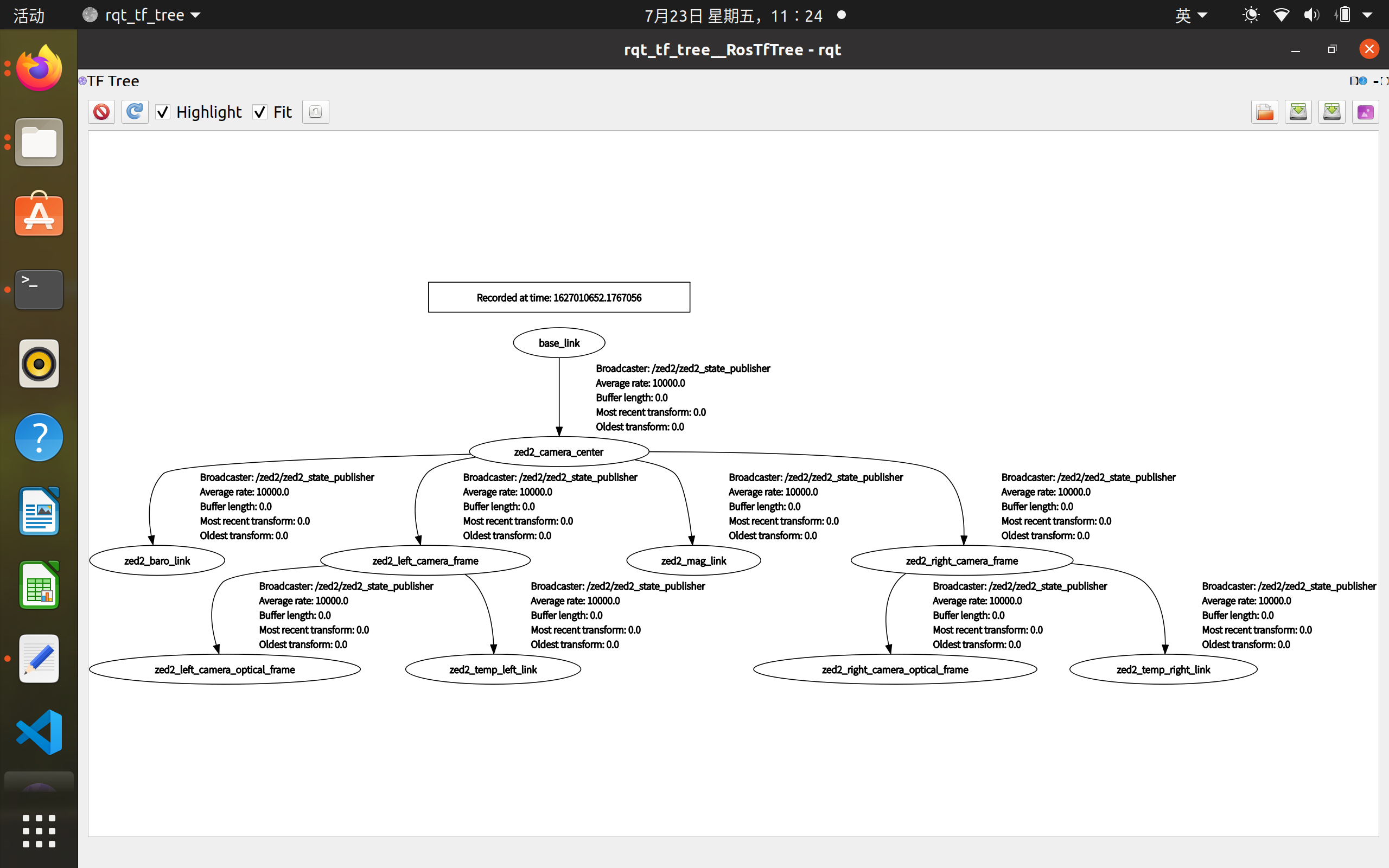
Additional context comman.yaml pos_tracking: pos_tracking_enabled: true # True to enable positional tracking from start publish_tf: true # publish
odom -> base_linkTF publish_map_tf: true # publishmap -> odomTF map_frame: 'map' odometry_frame: 'odom' area_memory_db_path: '' area_memory: true # Enable to detect loop closure floor_alignment: false # Enable to automatically calculate camera/floor offset initial_base_pose: [0.0,0.0,0.0, 0.0,0.0,0.0] # Initial position of thebase_frame-> [X, Y, Z, R, P, Y] init_odom_with_first_valid_pose: true # Enable to initialize the odometry with the first valid pose path_pub_rate: 2.0 # Camera trajectory publishing frequency path_max_count: -1 # use '-1' for unlimited path size two_d_mode: false # Force navigation on a plane. If true the Z value will be fixed to "fixed_z_value", roll and pitch to zero fixed_z_value: 0.00 # Value to be used for Z coordinate iftwo_d_modeis truezed2.yaml sensors: sensors_timestamp_sync: false # Synchronize Sensors messages timestamp with latest received frame publish_imu_tf: true # publish
IMU -> <cam_name>_left_camera_frameTF