Why do we need to develop a new feature?
Used to scan AR tags part of the URC mission. The ROS package for this is out of date and thus we need to update it to fit our needs.
Describe the solution you'd like
Update this ROS package to fit our needs.
Are there any ROS packages, libraries, or example code that you know of that might help solve the problem?
List any examples here using bullet points, or leave blank.
Ex:
Why do we need to develop a new feature? Used to scan AR tags part of the URC mission. The ROS package for this is out of date and thus we need to update it to fit our needs.
Describe the solution you'd like Update this ROS package to fit our needs.
Are there any ROS packages, libraries, or example code that you know of that might help solve the problem? List any examples here using bullet points, or leave blank. Ex:
Additional information
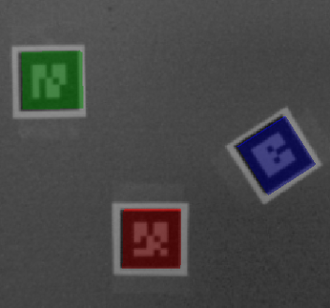
Here's a image of what I think it should look like: