RithikJ
commented
3 years ago
RithikJ
commented
3 years ago I am also getting the same errors, How to resolve this issue?
Open AbhinayNS opened 3 years ago
RithikJ
commented
3 years ago I am also getting the same errors, How to resolve this issue?
i tried using the second approach to launch the simulation and the following are the screenshots from the 7 terminals the problem i face is that the drone doesn't take off at all i followed all the installation steps properly
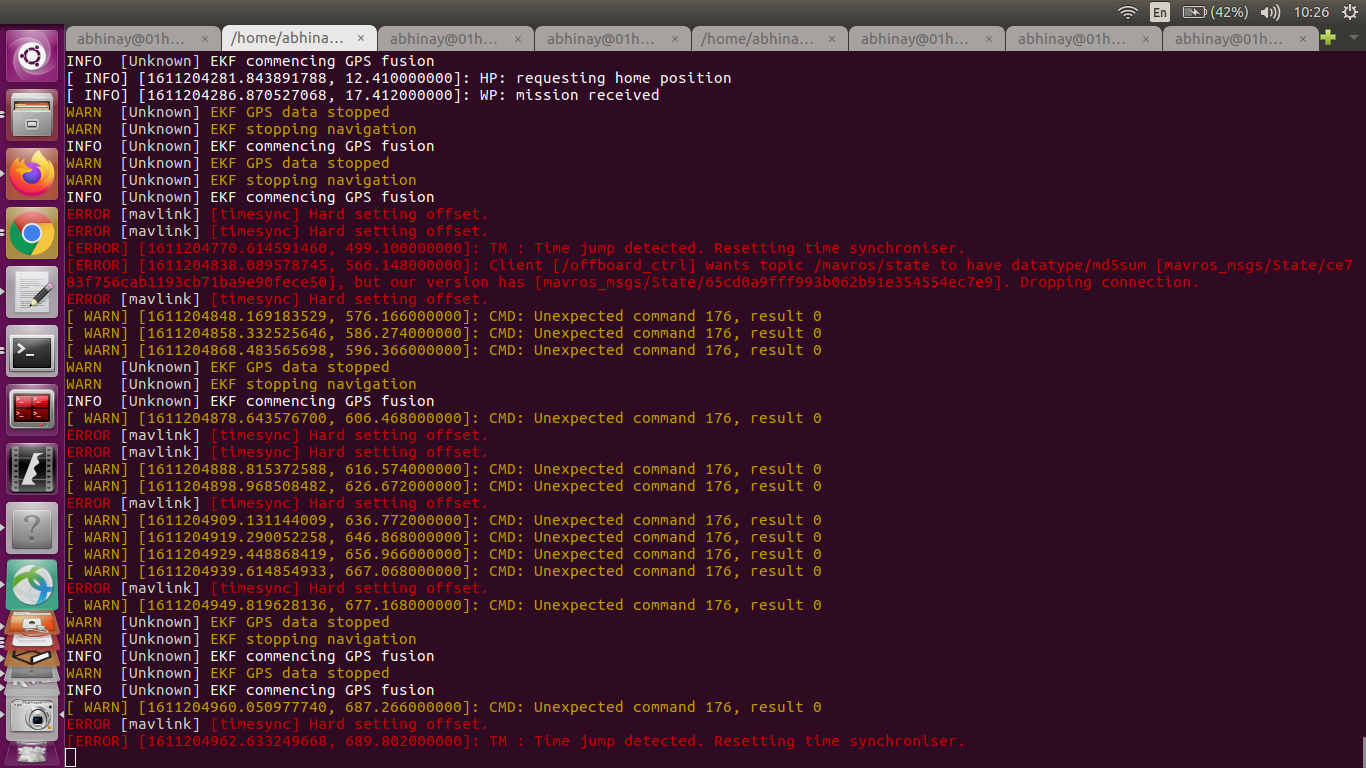
output of mavros_posix_sitl.launch
output of rosrun whycon whycon camera/image_rect_color:=/camera/rgb/image_raw camera/camera_info:=/camera/rgb/camera_info _targets:=1 _inner_diameter:=0.08 _outer_diameter:=0.1952
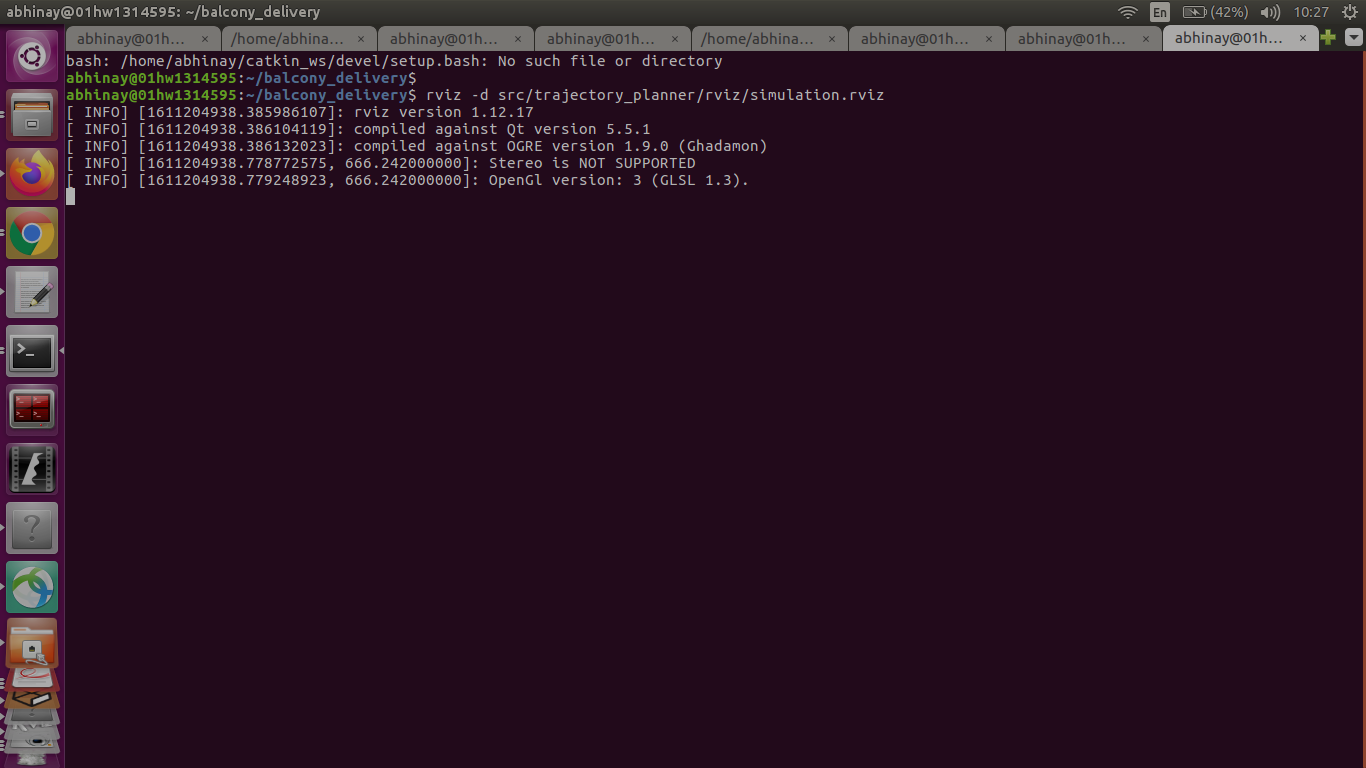
output of roslaunch svo_ros intel_aero.launch




output of gazebo window