 teemuatlut
commented
3 years ago
teemuatlut
commented
3 years ago You should decouple the step generation from the communication. What happens is the motor very briefly stops when the MCU executes everything else in the loop and that throws off the readings. You can use an interrupt like in the original example.
 graham-jessup
graham-jessup
I'm using a variant of the "Stallguard" example to tune the stallguard settings of my TMC 2130 SPI driver (from BigTreeTech), but I am having an SPI issue where the value for drv_status.sg_result returns 0 about half the time. SPI communication appears to be working for the most part, I can intialize the driver and run the stepper, but the real-time monitoring of the stallguard value is not very useful with all the zeros interspersed.
Am I missing a larger compatibility issue between the TMCStepper library and the Teensy 4.1?
What could be causing the SPI communication to intermittently fail?
Hardware: Teensy 4.1 BigtreeTech TMC2130 V3.0 SPI 24V power supply Nema 17 Stepper
Here's an example of what I'm seeing in the serial monitor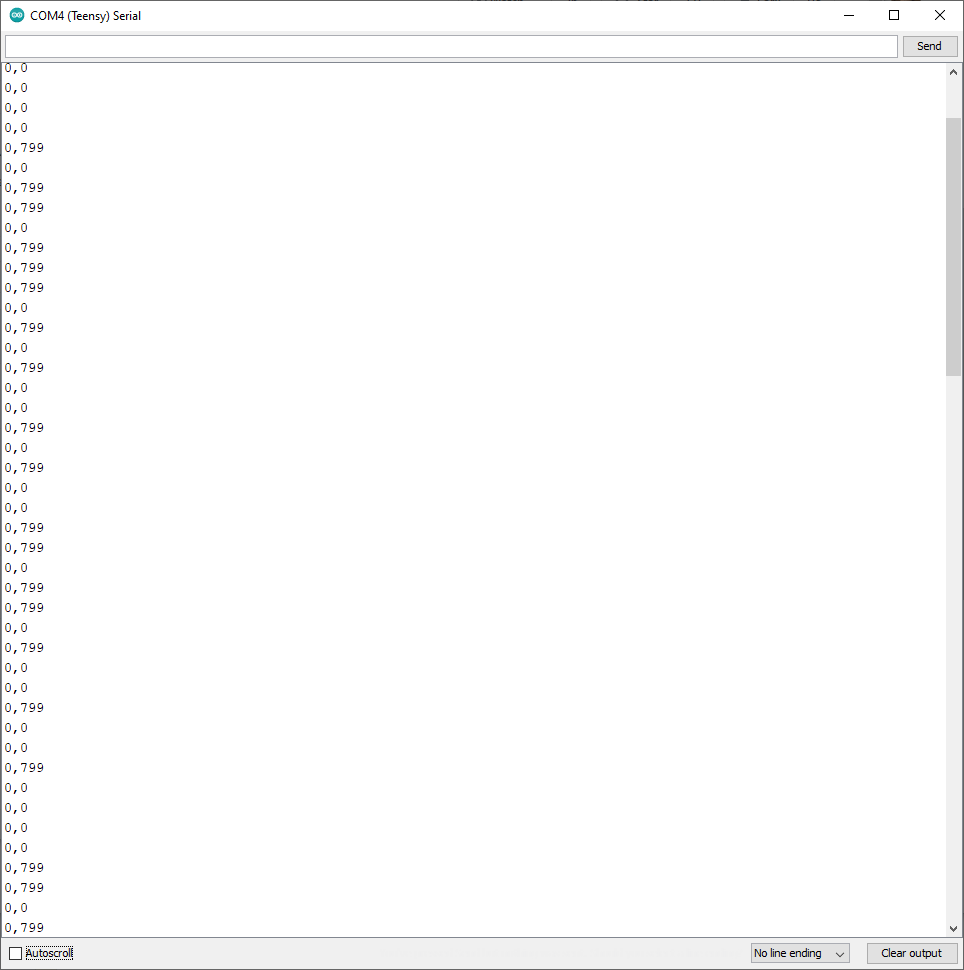
This is what I'm seeing with a logic analyzer reading the SPI communication when the drv_status.sg_result returns zero.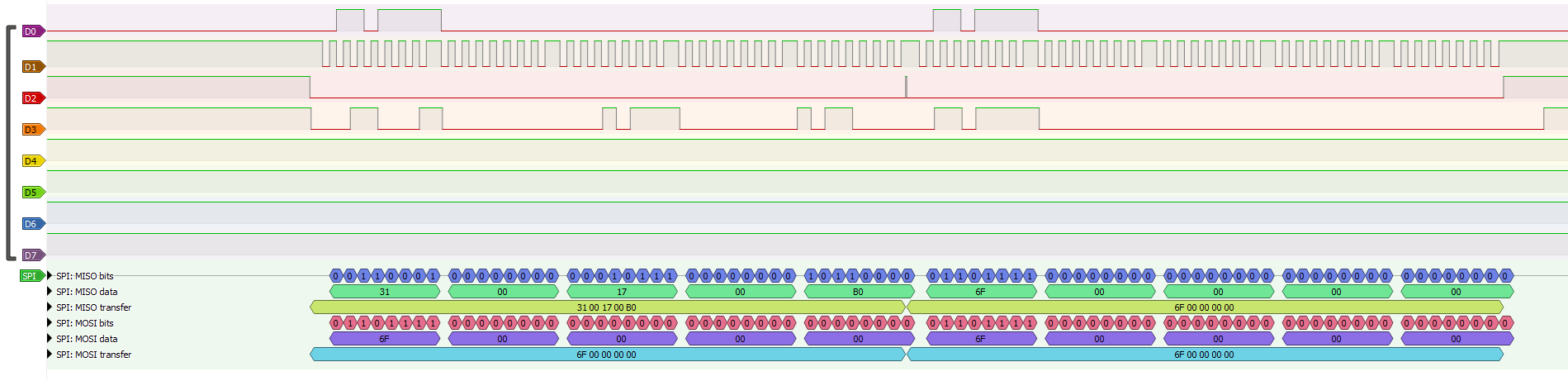
Here's a photo of my setup: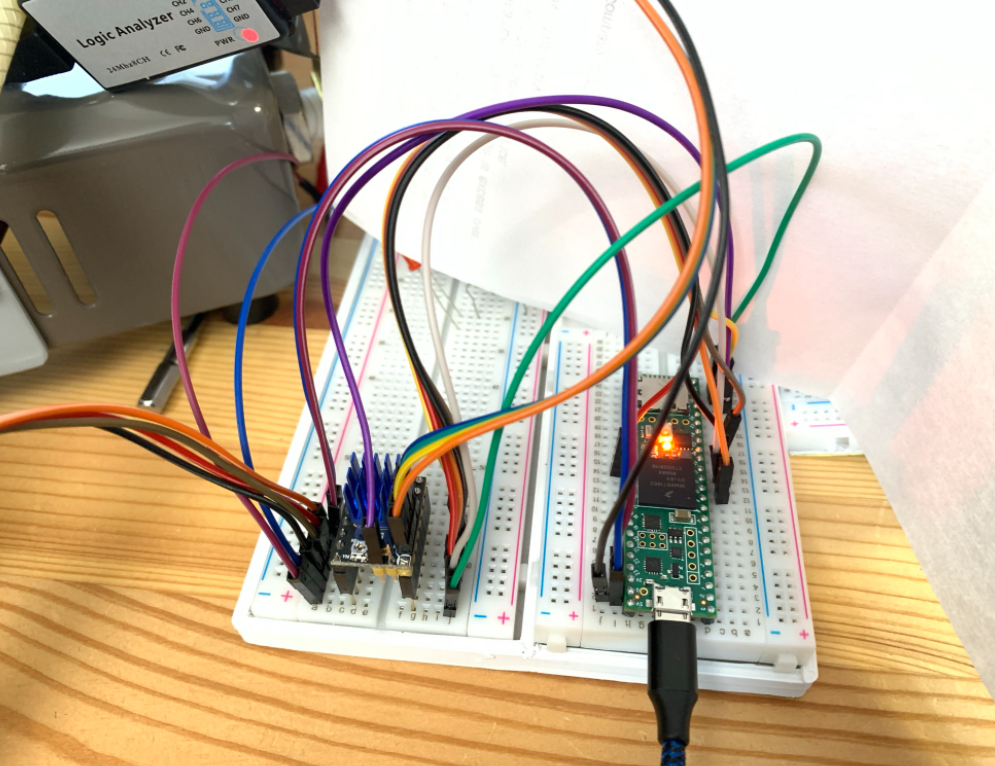
And finally the code: