teemuatlut
commented
3 years ago
teemuatlut
commented
3 years ago It's possible it might be an issue with board speed like with the Teensy. Try adding this to your code:
void TMC2130Stepper::switchCSpin(bool state) {
delay(2);
digitalWrite(_pinCS, state);
delay(2);
}It should override the weakly defined symbol from the library. The board is not terribly expensive so I'm considering getting one for testing but it'll take a bit to arrive.
 dev-000
dev-000
@teemuatlut I was trying out the TMCStepper library with an Adafruit Feather M4 Express board. I am currently running into issues. Would you know if this library was ever tested with an ATSAMD51 M4 series chips?
My hardware setup is an Adafruit Feather M4 Express and a Trinamic SilentStepStick -TMC2130 board.
Connections are as follows
I had wired up the motors correctly and tried run a basic full rotation code but it didn't work. So what I tried then was to check if the SPI connection and if I was able to read IOIN register with the following code[Ref].
With the M4 board, I am getting the following result
which seems to suggest that the drive current is not getting set properly.
When I replace the M4 board with an M0 Feather Basic board(Direct drop in replacement on a breadboard without changing any hardware other connection) and I upload the code with just changing the DIR pin value as it's mapped differently I get the following output
I am able to run a stepper without any issue with an M0 board with the TMCStepper library, which seems to suggest it might not be a hardware issue. I have double-checked the breadboard connections to ensure it's not loose or anything.
When I switch back to the M4 board and run the above code, sometimes(1 out of 10 times) I get the vsense value as being set and get the following result same as M0
So I am starting to suspect it might be an issue with SPI communication with the M4 board. I currently don't have a logic analyser to check if that is indeed the case. Is there any way for me figure out if its a hardware issue or a library issue? I had glanced through the datasheets of the ATSAMD21G18 and ATSAMD51J19A SPI sections and they look mostly similar. Can it have something to do with clock speed(ATSAMD51J19A runs at 120MHz)?
I have seen this thread as well where someone had issues with the library and Teensy 4.1 board because of speed. I tried changing the code as per the bug fix mentioned there but it didn't help fix my issue.
Can you please help point me in the right direction on how to debug this? If you think the library should work with the ATSAMD51 chips then I will focus my attention on potential hardware issues.
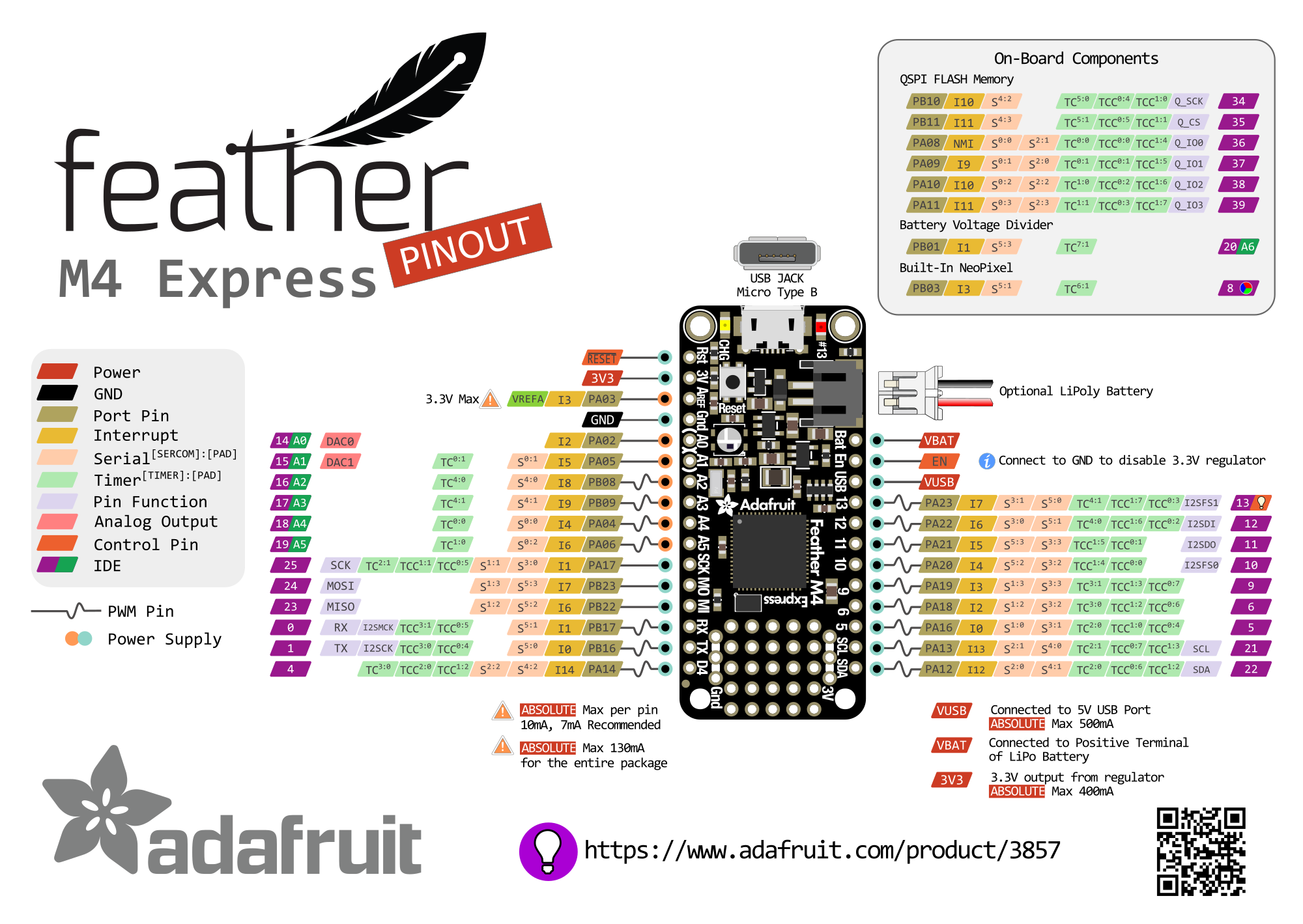
I am attaching the pinouts of the 2 Adafruit boards which I am using.