 teemuatlut
commented
3 years ago
teemuatlut
commented
3 years ago Your first priority should be establishing working communication. You can start with something simpler like this.
#include <TMCStepper.h>
// SW Serial so we can debug the responses
TMC2209Stepper driverX(2, 3, 0.11, 0b00);
TMC2209Stepper driverY(2, 3, 0.11, 0b10);
void setup() {
Serial.begin(115200);
driverX.begin();
driverY.begin();
}
void loop() {
auto versionX = driverX.version();
auto versionY = driverY.version();
if (versionX != 0x21) {
Serial.println("Driver X communication issue");
}
if (versionY != 0x21) {
Serial.println("Driver Y communication issue");
}
delay(2000);
} T-Workshop
T-Workshop leomcelroy
leomcelroy
 kirax999
kirax999 MATT-ER-HORN
MATT-ER-HORN
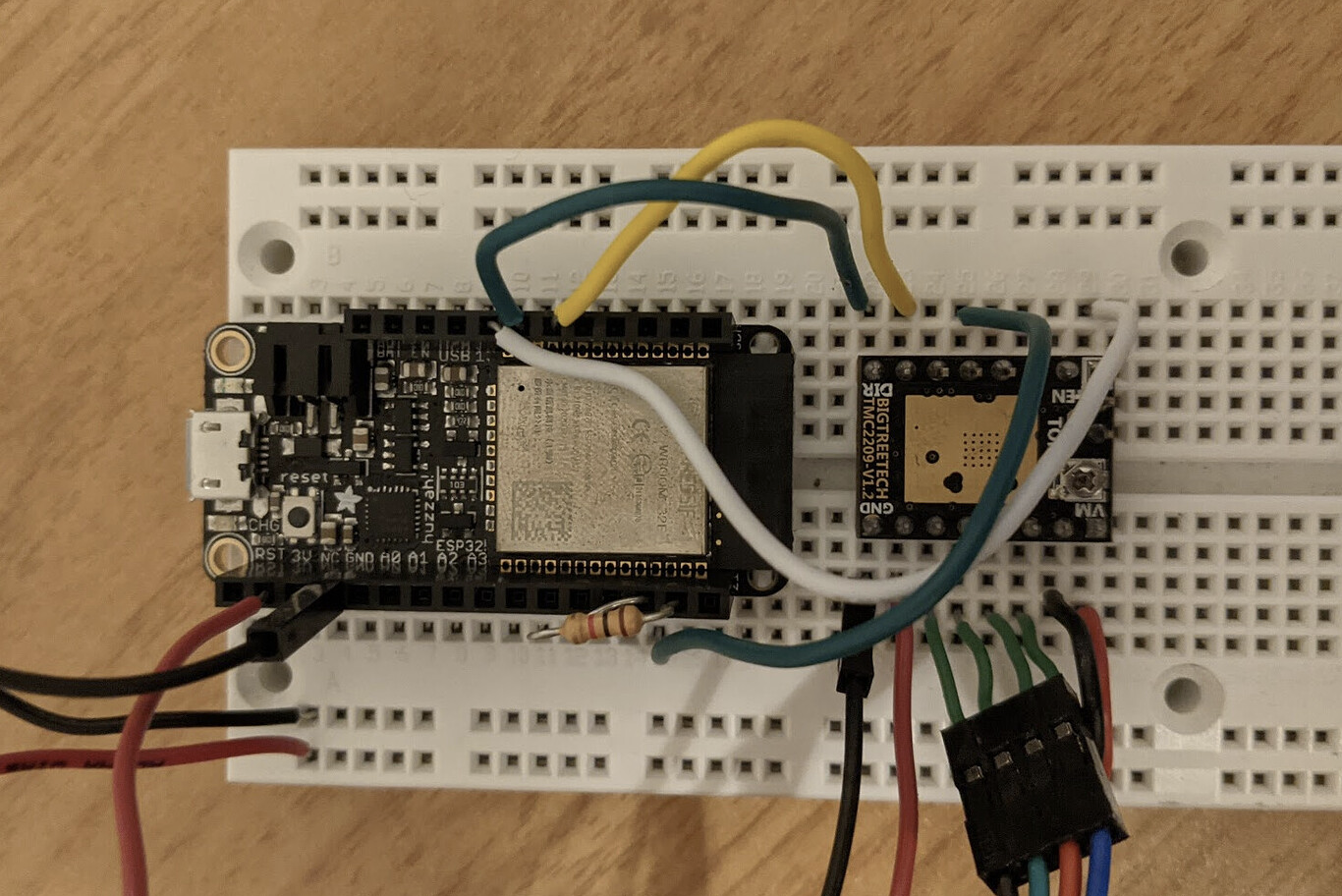
Hi teemuatlut, you did a great job with this library! I am having a little problem that I can't solve with your documentation (certainly because I am not much of a programmer) I want to swap old A4988 drivers with TMC2209s and because the board that the drivers go in can't do it I want to cofigure them via UART externally. I have them connected pretty much like this but on the second (Y) driver the MS2 pin is pulled high. And I want to set current for both of the drivers and also configure the Stallguard to be used as a homing feature.
I tried adjusting your example code but it doesn't seem to be working.
Can you please give me a hand on this? Also I am using arduino nano.
And I want to set current for both of the drivers and also configure the Stallguard to be used as a homing feature.
I tried adjusting your example code but it doesn't seem to be working.
Can you please give me a hand on this? Also I am using arduino nano.
(Code)
(END of code)
Thanks a lot!
Tomas