 M10CUBE
commented
3 years ago
M10CUBE
commented
3 years ago Hi @terjeio . Grate design. First of all did you build it? Is everything working OK or there are errors on PCB. Checking PCB for errors KiCAD (nightly builds V6) reported many. (not warnings) Most of them courtyard. Then what I did was to transfer your design into M10CUBE format. I did not sent any for FAB waiting your approval first I did not change anything just connected power from 40 pin Raspberry connector to your board. So this board now can be part (partially) to M10CUBE ecosystem.
I also see that you are contributing to PICO GRBL design. Here is the link of the post containing details about that: https://github.com/grblHAL/RP2040/discussions/3#discussioncomment-1541073
One last thing. Can I put "Polulu style motor driver "dummy" PCB from project " CNC_Boosterpack" here on CNC_Breakout_Nucleo64 project to control the DM556 driver? Or signals are inverted? I can not see the KiCAD design because of missing many libraries on the Polulu style motor driver "dummy KiCAD design " Having said that I like to contribute as far as I can on NUCLEO 64 design as well. Thank a lot
 terjeio
terjeio






 That is from top to bottom
STEP
DIR
EN
5V
Signals goes to (-) in DM556 driver inputs and all (+)inputs goes to 5v CONNECTED EXTERNALLY. This is the VDDF power but I can not find any other input on the board.
That is from top to bottom
STEP
DIR
EN
5V
Signals goes to (-) in DM556 driver inputs and all (+)inputs goes to 5v CONNECTED EXTERNALLY. This is the VDDF power but I can not find any other input on the board. 





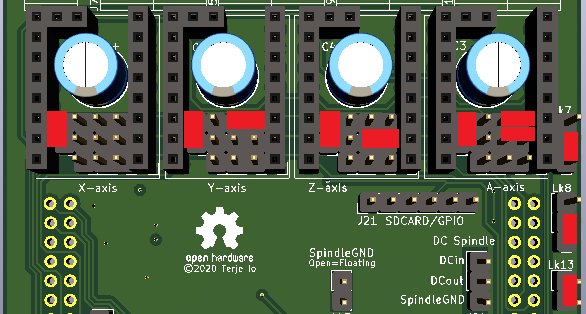
M10CUBE format CNC Brakeout Nucleo64