ajithvcoder
commented
4 years ago
ajithvcoder
commented
4 years ago I am also facing the error @snehitvaddi did u solve it ?
Closed snehitvaddi closed 4 years ago
ajithvcoder
commented
4 years ago I am also facing the error @snehitvaddi did u solve it ?
 snehitvaddi
commented
4 years ago
snehitvaddi
commented
4 years ago Yes, I did resolve. It worked after I changed the version of Tensorflow.
ajithvcoder
commented
4 years ago @snehitvaddi could you share your colab notebook to this mail id inocajith21.5@gmail.com . I tested in both cpu and gpu mode its giving me cannot connect to X server
ajithvcoder
commented
4 years ago no problem got it from your repo thanks
snehitvaddi
commented
4 years ago @ajithvallabai Is the code from my repo working fine?
ajithvcoder
commented
4 years ago @snehitvaddi no it showed "cannot connect to x server" then i commented the cv2.imshow line . After that it showed nothing in colab so i started to create conda and use in my pc
snehitvaddi
commented
4 years ago @ajithvallabai The error is caused by opencv. You need to comment 3 block of lines that: show the final frame (imshow), waitkey (like for when you want to press a letter in the keyboard to close the opencv window), and the one that "closes all windows". Basically, you cannot play videos in Colab. The alternative is to copy the videos to your drive (using %cp), and watch them there. I also couldn't play video in colab. I am trying to find a way to do so.
ajithvcoder
commented
4 years ago @snehitvaddi Thanks now it works i didnt comment out waitkey i think. may be you can add below code to your colab code if u like For faster computing
with tf.device('/gpu:0'):
!python object_tracker.py --video ./data/video/traffic.mp4 --output ./data/video/traffic-results2.avi --weights ./weights/yolov3.tfFor cannot connect server x error
%%writefile object_tracker.py
import time, random
import numpy as np
from absl import app, flags, logging
from absl.flags import FLAGS
import cv2
import matplotlib.pyplot as plt
import tensorflow as tf
from yolov3_tf2.models import (
YoloV3, YoloV3Tiny
)
from yolov3_tf2.dataset import transform_images
from yolov3_tf2.utils import draw_outputs, convert_boxes
from deep_sort import preprocessing
from deep_sort import nn_matching
from deep_sort.detection import Detection
from deep_sort.tracker import Tracker
from tools import generate_detections as gdet
from PIL import Image
flags.DEFINE_string('classes', './data/labels/coco.names', 'path to classes file')
flags.DEFINE_string('weights', './weights/yolov3.tf',
'path to weights file')
flags.DEFINE_boolean('tiny', False, 'yolov3 or yolov3-tiny')
flags.DEFINE_integer('size', 416, 'resize images to')
flags.DEFINE_string('video', './data/video/test.mp4',
'path to video file or number for webcam)')
flags.DEFINE_string('output', None, 'path to output video')
flags.DEFINE_string('output_format', 'XVID', 'codec used in VideoWriter when saving video to file')
flags.DEFINE_integer('num_classes', 80, 'number of classes in the model')
def main(_argv):
# Definition of the parameters
max_cosine_distance = 0.5
nn_budget = None
nms_max_overlap = 1.0
#initialize deep sort
model_filename = 'model_data/mars-small128.pb'
encoder = gdet.create_box_encoder(model_filename, batch_size=1)
metric = nn_matching.NearestNeighborDistanceMetric("cosine", max_cosine_distance, nn_budget)
tracker = Tracker(metric)
physical_devices = tf.config.experimental.list_physical_devices('GPU')
if len(physical_devices) > 0:
tf.config.experimental.set_memory_growth(physical_devices[0], True)
if FLAGS.tiny:
yolo = YoloV3Tiny(classes=FLAGS.num_classes)
else:
yolo = YoloV3(classes=FLAGS.num_classes)
yolo.load_weights(FLAGS.weights)
logging.info('weights loaded')
class_names = [c.strip() for c in open(FLAGS.classes).readlines()]
logging.info('classes loaded')
try:
vid = cv2.VideoCapture(int(FLAGS.video))
except:
vid = cv2.VideoCapture(FLAGS.video)
out = None
if FLAGS.output:
# by default VideoCapture returns float instead of int
width = int(vid.get(cv2.CAP_PROP_FRAME_WIDTH))
height = int(vid.get(cv2.CAP_PROP_FRAME_HEIGHT))
fps = int(vid.get(cv2.CAP_PROP_FPS))
codec = cv2.VideoWriter_fourcc(*FLAGS.output_format)
out = cv2.VideoWriter(FLAGS.output, codec, fps, (width, height))
list_file = open('detection.txt', 'w')
frame_index = -1
fps = 0.0
count = 0
while True:
_, img = vid.read()
if img is None:
logging.warning("Empty Frame")
time.sleep(0.1)
count+=1
if count < 3:
continue
else:
break
img_in = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
img_in = tf.expand_dims(img_in, 0)
img_in = transform_images(img_in, FLAGS.size)
t1 = time.time()
boxes, scores, classes, nums = yolo.predict(img_in)
classes = classes[0]
names = []
for i in range(len(classes)):
names.append(class_names[int(classes[i])])
names = np.array(names)
converted_boxes = convert_boxes(img, boxes[0])
features = encoder(img, converted_boxes)
detections = [Detection(bbox, score, class_name, feature) for bbox, score, class_name, feature in zip(converted_boxes, scores[0], names, features)]
#initialize color map
cmap = plt.get_cmap('tab20b')
colors = [cmap(i)[:3] for i in np.linspace(0, 1, 20)]
# run non-maxima suppresion
boxs = np.array([d.tlwh for d in detections])
scores = np.array([d.confidence for d in detections])
classes = np.array([d.class_name for d in detections])
indices = preprocessing.non_max_suppression(boxs, classes, nms_max_overlap, scores)
detections = [detections[i] for i in indices]
# Call the tracker
tracker.predict()
tracker.update(detections)
for track in tracker.tracks:
if not track.is_confirmed() or track.time_since_update > 1:
continue
bbox = track.to_tlbr()
class_name = track.get_class()
color = colors[int(track.track_id) % len(colors)]
color = [i * 255 for i in color]
cv2.rectangle(img, (int(bbox[0]), int(bbox[1])), (int(bbox[2]), int(bbox[3])), color, 2)
cv2.rectangle(img, (int(bbox[0]), int(bbox[1]-30)), (int(bbox[0])+(len(class_name)+len(str(track.track_id)))*17, int(bbox[1])), color, -1)
cv2.putText(img, class_name + "-" + str(track.track_id),(int(bbox[0]), int(bbox[1]-10)),0, 0.75, (255,255,255),2)
### UNCOMMENT BELOW IF YOU WANT CONSTANTLY CHANGING YOLO DETECTIONS TO BE SHOWN ON SCREEN
#for det in detections:
# bbox = det.to_tlbr()
# cv2.rectangle(img,(int(bbox[0]), int(bbox[1])), (int(bbox[2]), int(bbox[3])),(255,0,0), 2)
# print fps on screen
fps = ( fps + (1./(time.time()-t1)) ) / 2
cv2.putText(img, "FPS: {:.2f}".format(fps), (0, 30),
cv2.FONT_HERSHEY_COMPLEX_SMALL, 1, (0, 0, 255), 2)
#cv2.imshow('output', img)
if FLAGS.output:
out.write(img)
frame_index = frame_index + 1
list_file.write(str(frame_index)+' ')
if len(converted_boxes) != 0:
for i in range(0,len(converted_boxes)):
list_file.write(str(converted_boxes[i][0]) + ' '+str(converted_boxes[i][1]) + ' '+str(converted_boxes[i][2]) + ' '+str(converted_boxes[i][3]) + ' ')
list_file.write('\n')
# # press q to quit
# if cv2.waitKey(1) == ord('q'):
# break
vid.release()
if FLAGS.ouput:
out.release()
list_file.close()
#cv2.destroyAllWindows()
if __name__ == '__main__':
try:
app.run(main)
except SystemExit:
passSo, are you able to play the video on colab??
ajithvcoder
commented
4 years ago no i colab we cant play . we can move it to our google drive that would be the best solution .as we can forward and reverse .
But i know a way to open web cam from google colab may be you can find ways with it .
from IPython.display import display, Javascript
from google.colab.output import eval_js
from base64 import b64decode
def take_photo(filename='photo.jpg', quality=0.8):
js = Javascript('''
async function takePhoto(quality) {
const div = document.createElement('div');
const capture = document.createElement('button');
capture.textContent = 'Capture';
div.appendChild(capture);
const video = document.createElement('video');
video.style.display = 'block';
const stream = await navigator.mediaDevices.getUserMedia({video: true});
document.body.appendChild(div);
div.appendChild(video);
video.srcObject = stream;
await video.play();
// Resize the output to fit the video element.
google.colab.output.setIframeHeight(document.documentElement.scrollHeight, true);
// Wait for Capture to be clicked.
await new Promise((resolve) => capture.onclick = resolve);
const canvas = document.createElement('canvas');
canvas.width = video.videoWidth;
canvas.height = video.videoHeight;
canvas.getContext('2d').drawImage(video, 0, 0);
stream.getVideoTracks()[0].stop();
div.remove();
return canvas.toDataURL('image/jpeg', quality);
}
''')
display(js)
data = eval_js('takePhoto({})'.format(quality))
binary = b64decode(data.split(',')[1])
with open(filename, 'wb') as f:
f.write(binary)
return filenameif u execute above command and allow camera in the pop up u can take a photo .and u can see the live web cam also during that time .
i took above code from code snippets that is available at the left corner with symbol <>
snehitvaddi
commented
4 years ago @ajithvallabai Thanks man!!
 kasri-mids
commented
3 years ago
kasri-mids
commented
3 years ago Yes, I did resolve. It worked after I changed the version of Tensorflow.
Which version of tensorflow?
 BluceMengyu
commented
3 years ago
BluceMengyu
commented
3 years ago 这里得 ”net/%s:0“ 是对应tensorflow的1.0系列版本,如果是tensorflow的2.0系列版本为 “%s:0”
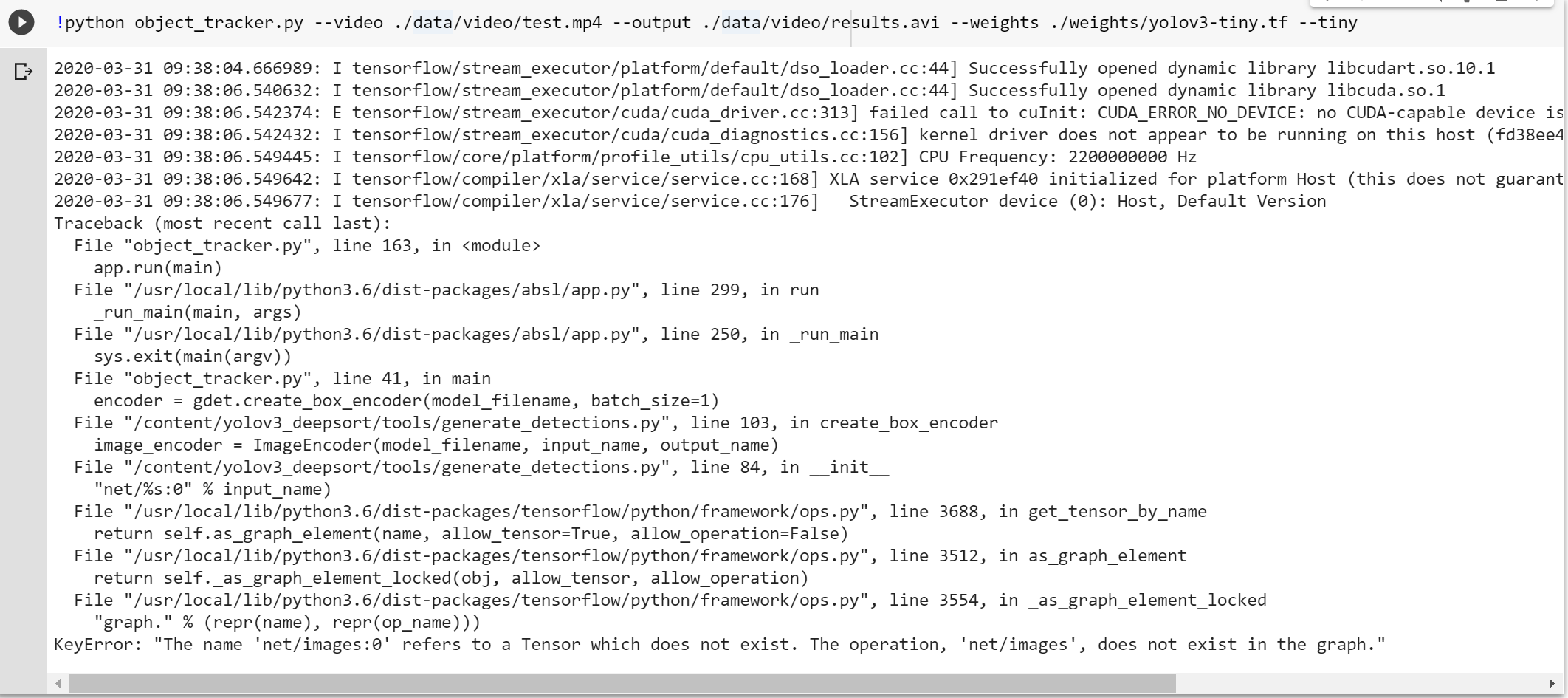
Facing this error. I am running this in Google Colab I have followed your video tutorial and copy-pasted as it is.