 tfoote
commented
5 years ago
tfoote
commented
5 years ago If you don't have a localization algorithm running the connectivity to the map frame is not expected. If you change the "Fixed Frame" in the rviz global options to something like base_link or base_footprint

 DanielArnett
DanielArnett
I'm trying to drive the turtlebot in Gazebo. I've done this quite a few times, but now isn't working for some reason. I've done it before on Indigo, but struggling on Kinetic.
My installation procedure:
Now I try to run gazebo
roslaunch turtlebot_gazebo turtlebot_world.launchroslaunch turtlebot_teleop keyboard_teleop.launchNow I send teleop commands but see no movement. So I check the topics and see if there is any movement:
/turtlebot_node/cmd_velis responding to my teleop commands, the x velocity smoothly accelerates from 0.0 to 0.2 as expected./cmd_vel_mux/input/teleopdoes the same. With both of these I believe that turtlebot should now be moving.Here's my rqt_graph
Here's my frames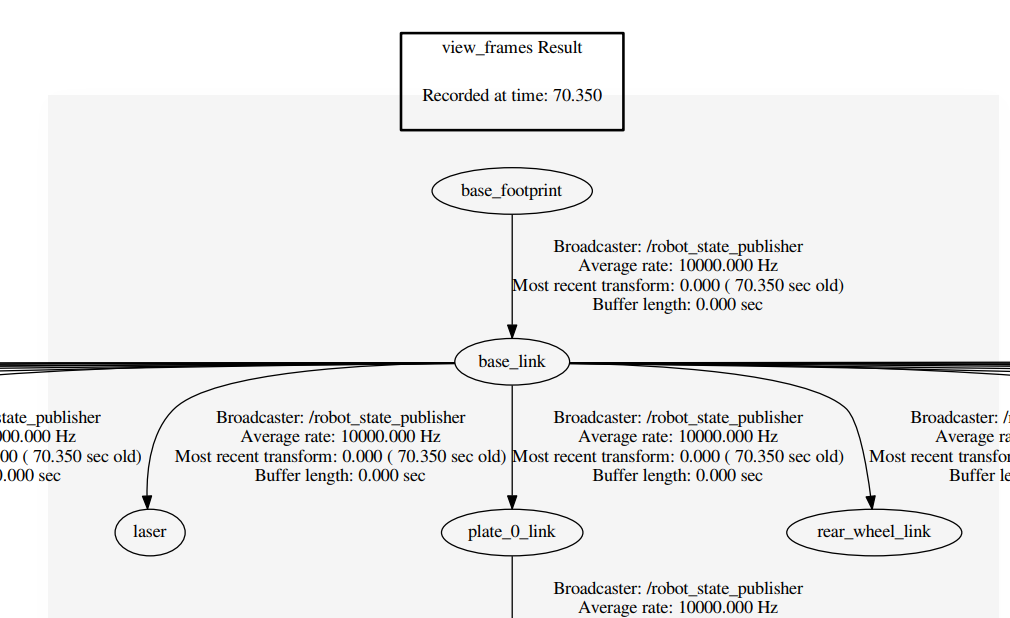
Notice that there is no /map frame.
When I open rviz I see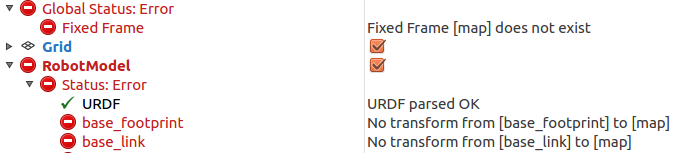
and this continues for every frame. So I add a static transform to try to fix this.
rosrun tf static_tf_publisher 0 0 0 0 0 0 map base_footprint 100Now that error goes away but there's weirdness. The wheels still don't have the correct transformation?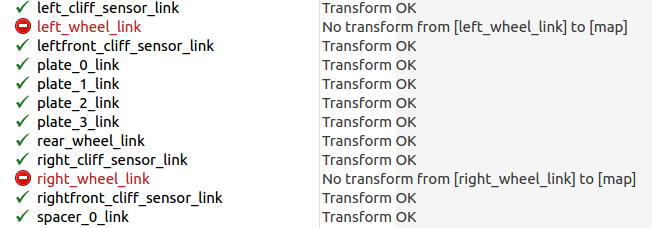
So that's essentially where I am. The tfs aren't working by default. I've tried uninstalling, reinstalling, using different installation instructions on fresh partitions but I keep running into this unmoving turtlebot. Any help would be appreciated.