 Diamondragon808
commented
6 months ago
Diamondragon808
commented
6 months ago - "Your packet is in the radio, and needs to be sent from the radio to the Teensy."
- In the rfm23_channel.cpp, we have the function '_receive_fromradio'. This looks like our main method for getting packets of data from our radio. At the end of this function, our packet also gets routed to the main channel.
- At the beginning of this process, this is all occurring in the channel of our radio (rfm23).
- The packet in this channel gets routed to the main channel thanks to the functions in rfm23_channel.cpp. More specifically it looks like this is thanks to '_route_packet_tomain' which was defined in artemis_defs.cpp.
- Based on previous questions and paths, I think that the packet will be routed to the main channel. Although, various functions in artemis_defs.cpp can also lead to packets being routed to other places such as the raspberry pi and pdu.
 montoyaoa
montoyaoa
This issue will help you become acquainted with PacketComm, and the flow of packets through the Teensy FSW. It is helpful to think in terms of packets and their flow, since the is the primary method by which different parts of the satellite talk to each other.
Presume you have a packet incoming in from the ground using the RFM23 radio. Your job is to describe in as much detail as possible, how the packet is handled through the flight software.
Obviously I won't throw you into this blind, and I want you to fully understand the software. So, I'm going to provide some questions, which should help guide your exploration of the code.
This should provide a helpful start in navigating the codebase in VSCode. Here are some helpful resources:
This is a diagram of the FSW architecture. You can see, generally, how different parts of the satellite are connected via different communications protocols.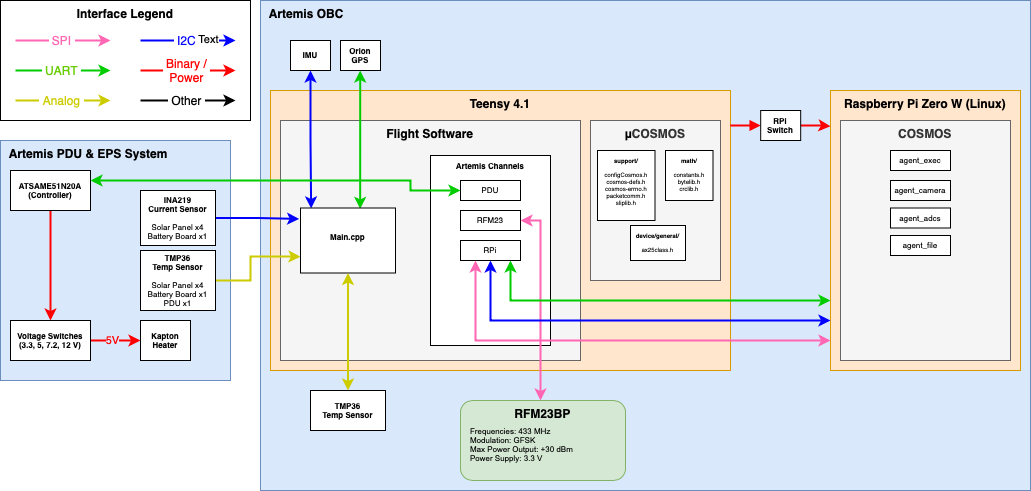
VSCode is a very helpful editor. If you want to learn more about something, just hover over it and you can see more about it. This is, of course, if someone documented it before.
Additionally, you can right-click on things to bring up a menu: There are a few helpful choices here:
There are a few helpful choices here:
Hopefully this helps you become more familiar with the codebase! Navigating unfamiliar code with your IDE really is an extremely valuable skill as a software developer.