 wh200720041
commented
4 years ago
wh200720041
commented
4 years ago Hi @MrMixit
Thanks for your question here.
I tested your rosbag and I re-opened a new project floam-ssl because the sensor configuration as well as the algorithm is much different from velodyne lidar
https://github.com/wh200720041/FLOAM_ssl.git
You may have a quick test with that algorithm. Unfortunately, I dont have solid state lidar on hand and I cant carry out further evaluation.
According to my test, I think one problem with L515 is the range. The detection range is too short, subsequently, there are little geometric features. I think it may reduce localization accuracy.
Han
 MrMixit
MrMixit

Hi!
I have tried to modify the laser processing to be able to process data from the Realsense L515 lidar by adding the following lines in laserProcessingClass.cpp (in the featureExtraction() function):
I assumed that by recording depth with 640x480 resolution I would get 480 scan lines. The L515 has a vertical FOV of 55, but Intel does not say anything about "absolute angular limits" such as what we have for velodyne lidars, so it is hard to tell exactly how I should sort it into scanIDs, but I did some print debugging and these limits I chose did not seem to exclude any measurements.
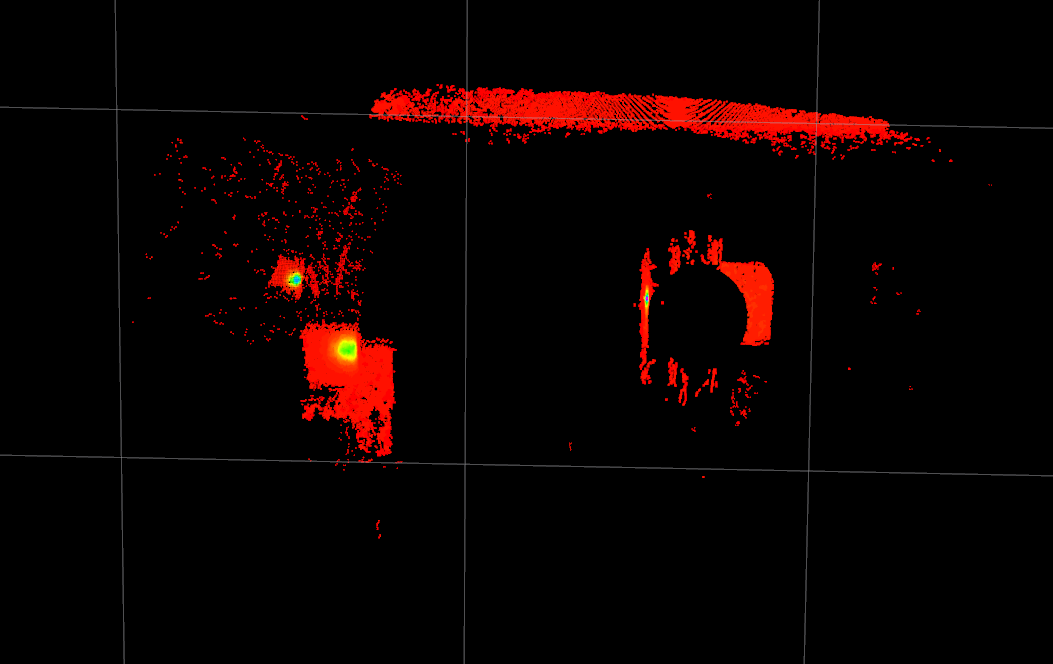
My main issue is that the filtered point clouds have circular "holes" in the middle of the FOV, see the attached screenshots. This Lidar is not recording in sweeps of 360 degrees, so this might be one of the reasons we are getting bad results. I could not understand from the code if/where assumptions about this are made.
I have been running the launch file with these parameters:
Again, I do not really know what to set the vertical angle to, but we have been streaming with 30 fps and the Lidar has a range from 0.25 to 9 meters. The entire rosbag I ran it with is around 8 GB and contains images as well as imu measurements, but I sent you an 18 second sample through WeTransfer. Let me know if I can provide you with any additional information.