-
Since the challenge has ended, it turns out to be a difficult one. Especially due to the translation vector estimation: 2.8 meter threshold is very challenging. From my personal opinion, the car pose …
-
# Proposed Functionality
The robot can drive a curve in autonomous mode, as opposed to stopping and turning in place. This allows the robot to maintain momentum and therefore complete any driving …
-
This is a post I'm developing ... It's been in my head for the last few years.
I'm going to need a few hours of focus time to flesh it out.
I really don't like writing "essays" in GitHub issues bec…
-
## 背景
~ 阐述 记录/问题/事件/... 发生的背景
网约车的核心在于 车辆调度, 里面的核心技术是 `实时地图匹配`
匹配是 网约车 和 用户之间的匹配, 也可以是骑手和用户之间的匹配
找到一个最优的路径规划
有点像地图导航
首先是定位, 再是寻找路径
路径规划 有点像机器人的路径规划, 但是那种比较简单, 一个格子一个格子计算的那种
定位一般采用 GPS, 但是往…
-
A Safe Hierarchical Planning Framework for Complex Driving Scenarios based on Reinforcement Learning. (arXiv:2101.06778v1 [cs.RO])
https://ift.tt/3sEGmMH
Autonomous vehicles need to handle various tra…
-
[Depth Completion via Inductive Fusion of Planar LIDAR and Monocular Camera](https://ieeexplore.ieee.org/abstract/document/9341385)
-
Hi, I'm student studying NN with your great source.
Thanks for your project, we succeeded image recognition in window and linux inspite of having trouble with many dependency problems with GPU) …
-
# 🚀 Feature Request
### 📝 Description
Character motivations should be moved from scenes to story events.
### ✨ Describe the solution you'd like
Currently, scenes keep track of characte…
-
### Description
Because I have no TTS installed, I cannot say anything about voice prompts, but when leaving a motorway the point of leaving the motorway (shown by the number of metres) is at the e…
-
## 상담료 지불 방식
- 주말안(6/2, 오후 9시까지) 에 아래의 알고리즘을 각자 검증하여 결과를 리포팅 할 것
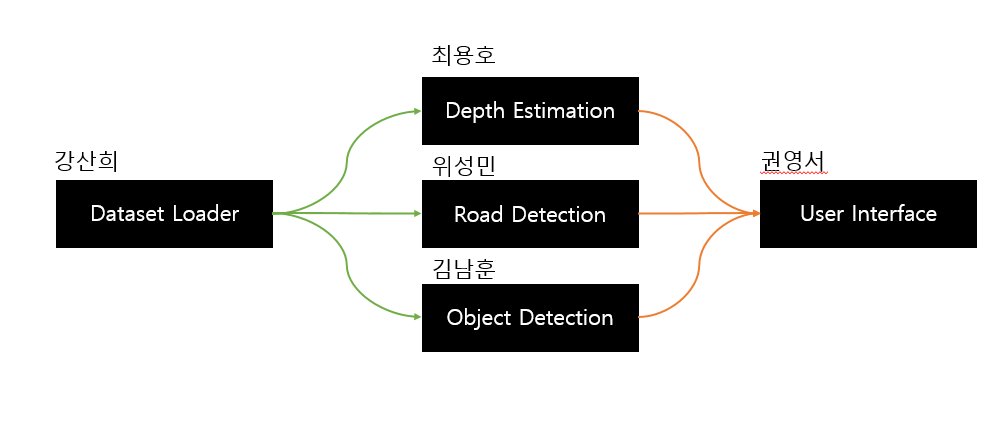
## 역할분담