The TREETOPS package provides functions utilizing a growing tree region (GTR) treetop identification algorithm using low point density LiDAR data derived Canopy Height Model (CHM).The package is meant to be used within the framework of the lidR package and intends to be coupled with CHM-based tree segmentation methods.
Original paper
A new method for individual treetop detection with low-resolution aerial laser scanned data
https://doi.org/10.1007/s40808-024-02060-w
Required packages (make sure they are installed)
tidyverse, terra, sf, data.table, crayon
Installation
devtools::install_github("DijoG/TREETOPS")Example
Demonstration of how to use TREETOPS.
Data preparation
TREETOPS::check_PACKS()
# Either:
> No need, packages already installed.
# or:
> All packages installed.
require(lidR)
# Forest point cloud (low resolution example data)
LASfile <- system.file("extdata", "MixedConifer.laz", package = "lidR")
Alas <- readLAS(LAS, filter = "-drop_z_below 0")
# Black, white and green color palette for visualizing CHM
bgcol <- function(x)
{
col = grDevices::colorRampPalette(c("grey1", "white", "forestgreen"))
return(col(x))
}Obtain CHM
CHM <- rasterize_canopy(Alas, 0.5, pitfree(subcircle = 0.25))Compute treetops (takes longer depending on the performance of your computer)
treetops <- TREETOPS::get_TREETOPS(CHM, min_H = 5)Visualize
plot(CHM, main = "CHM 0.5 pitfree ~ treetops", col = bgcol(50), axes = F)
plot(sf::st_geometry(treetops), add = T, pch = 1, col = "firebrick3")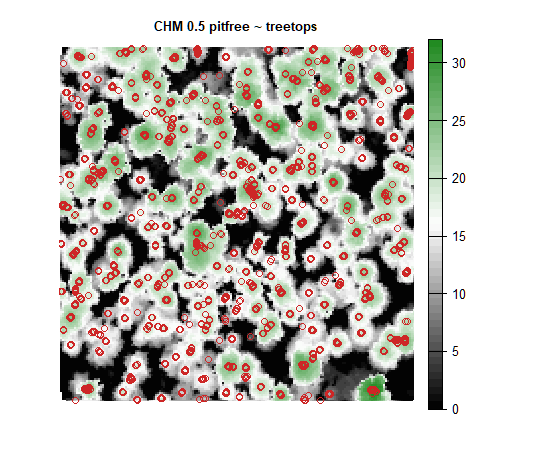
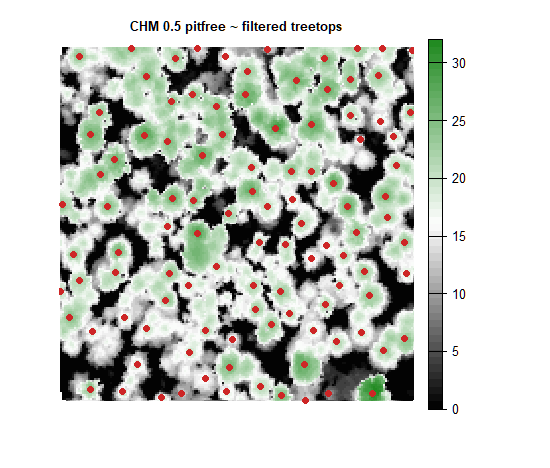
Finalize treetops (filter)
?TREETOPS::finalize_TREETOPS
fin_treetops <- TREETOPS::finalize_TREETOPS(treetops, distance = 5, min_H = 5)Visualize
plot(CHM, main = "CHM 0.5 pitfree ~ filtered treetops", col = bgcol(50), axes = F)
plot(sf::st_geometry(fin_treetops), add = T, pch = 16, col = "firebrick3")