AWR: Adaptive Weighting Regression for 3D Hand Pose Estimation
New:
-
2021/11/30: We have updated our code and integrate test & train code both in
train.py. To validate our model, simply runtrain.pyand you should get the result forhourglass_1. -
An update version of paper is here. We re-compute the params and FLOPs of each network structure, mainly on Hourglass and update the results accordingly.
This is the official repository for AAAI 2020 paper AWR: Adaptive Weighting Regression for 3D Hand Pose Estimation. by Weiting Huang*, Pengfei Ren*, Jingyu Wang, Qi Qi, Haifeng Sun (* denotes equal contribution)
Codes are implemented with Python 3.7.0 and Pytorch 1.4.0.
Introduction
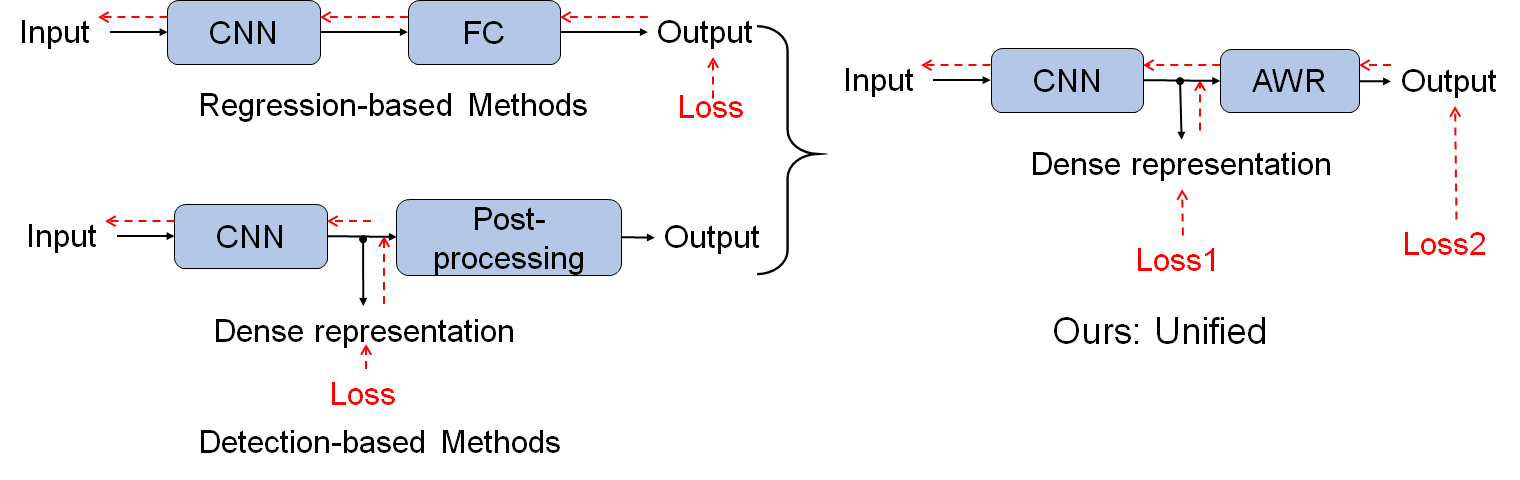
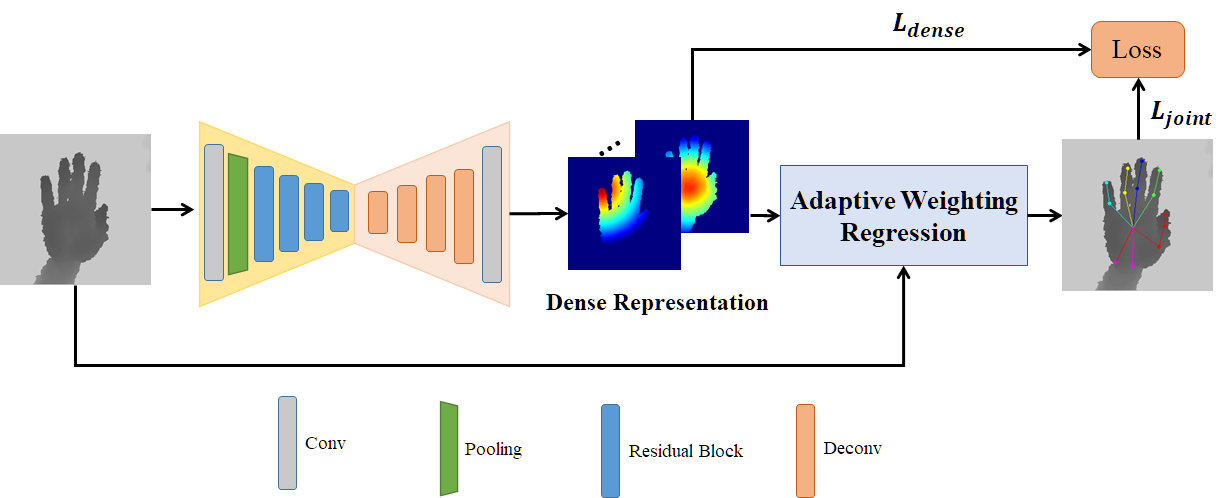
We propose an adaptive weighting regression (AWR) method to leverage the advantages of both detection-based and regression-based method. Hand joint coordinates are estimated as discrete integration of all pixels in dense representation, guided by adaptive weight maps. This learnable aggregation process introduces both dense and joint supervision that allows end-to-end training and brings adaptability to weight maps, making network more accurate and robust.
Code Setup
We provide result on NYU dataset with Resnet18 (resnet_18_uvd.txt) and inferencing code.
- Download NYU dataset and put
trainandtestdirectory in./data/nyu. We also provide hand center trained using a separate 2DCNN. pip install -r requirements.txt- Modify
./config.pyaccording to your setting. - Run code
python test.py
New:
- We update training and data augmentation code for reference.
- We provide HourGlass network and a pretrained model on HourGlass-1stage. You can set
load_model='./results/hourglass_1.pth'to run the code.
Citation
If you find our work useful in your research, please citing:
@inproceedings{awr,
title={AWR: Adaptive Weighting Regression for 3D Hand Pose Estimation},
author={Weiting Huang and Pengfei Ren and Jingyu Wang and Qi Qi and Haifeng Sun},
booktitle={AAAI Conference on Artificial Intelligence (AAAI)},
year={2020}
}